Monte Carlo methods
Reinforcement Learning with Gymnasium in Python

Fouad Trad
Machine Learning Engineer
Recap: model-based learning
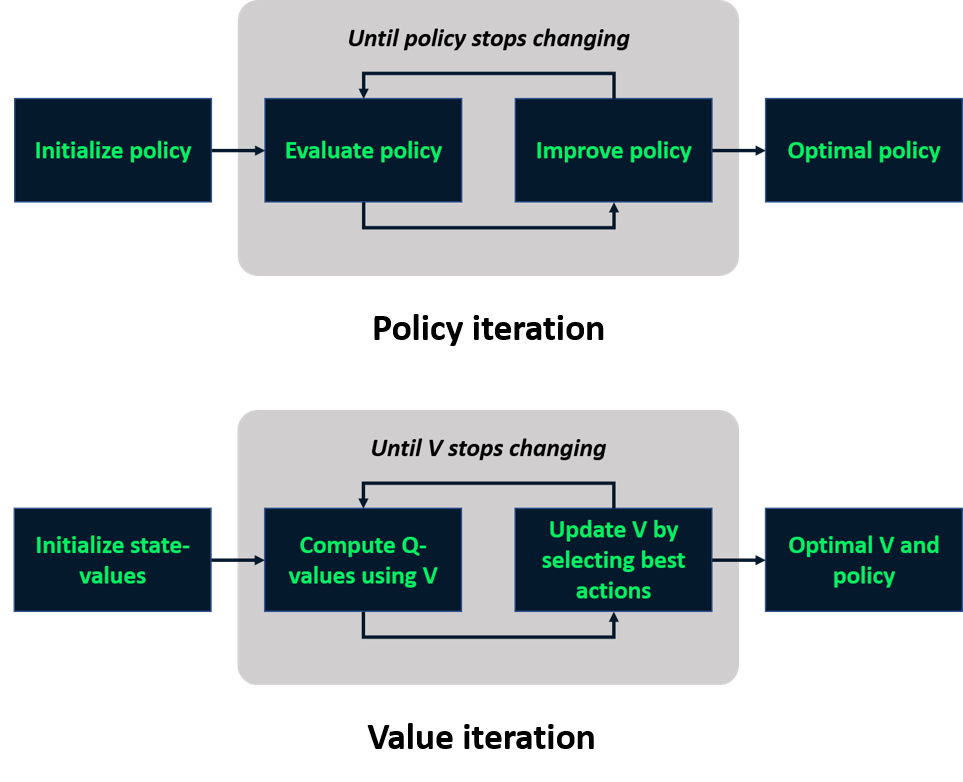
Model-free learning

Monte Carlo methods
- Model-free techniques
- Estimate Q-values based on episodes
Monte Carlo methods
- Model-free techniques
- Estimate Q-values based on episodes
Monte Carlo methods
- Model-free techniques
- Estimate Q-values based on episodes
- Two methods: first-visit, every-visit
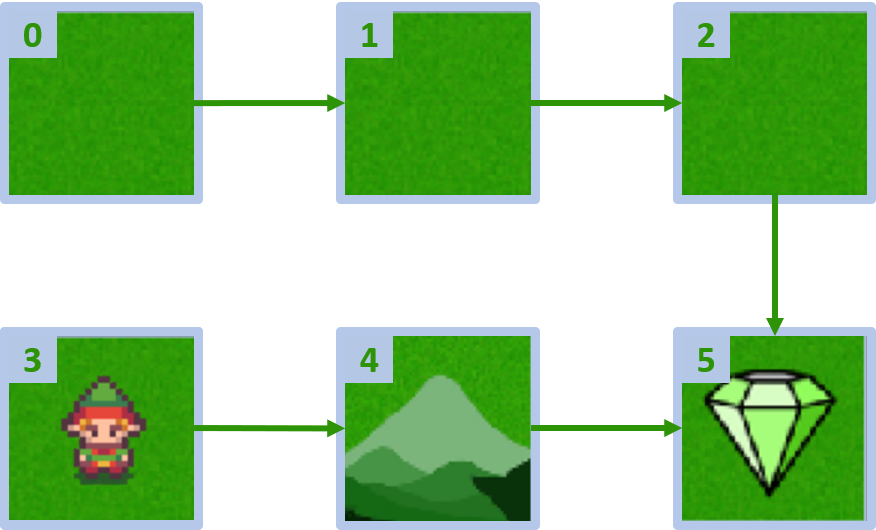
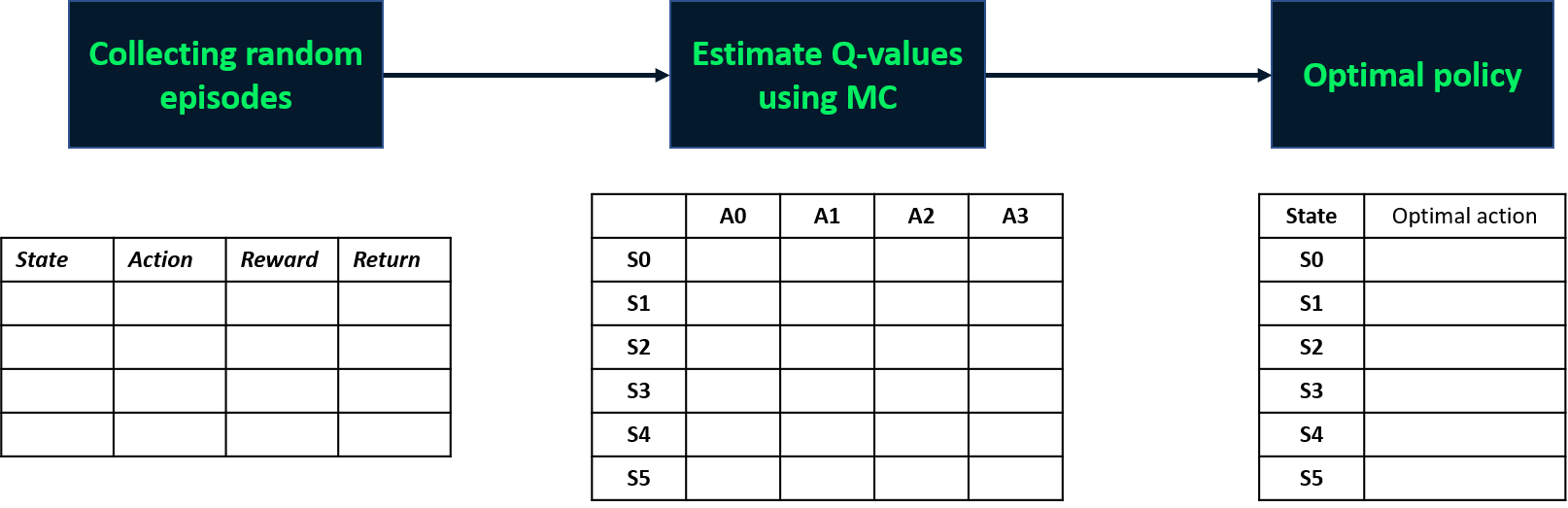
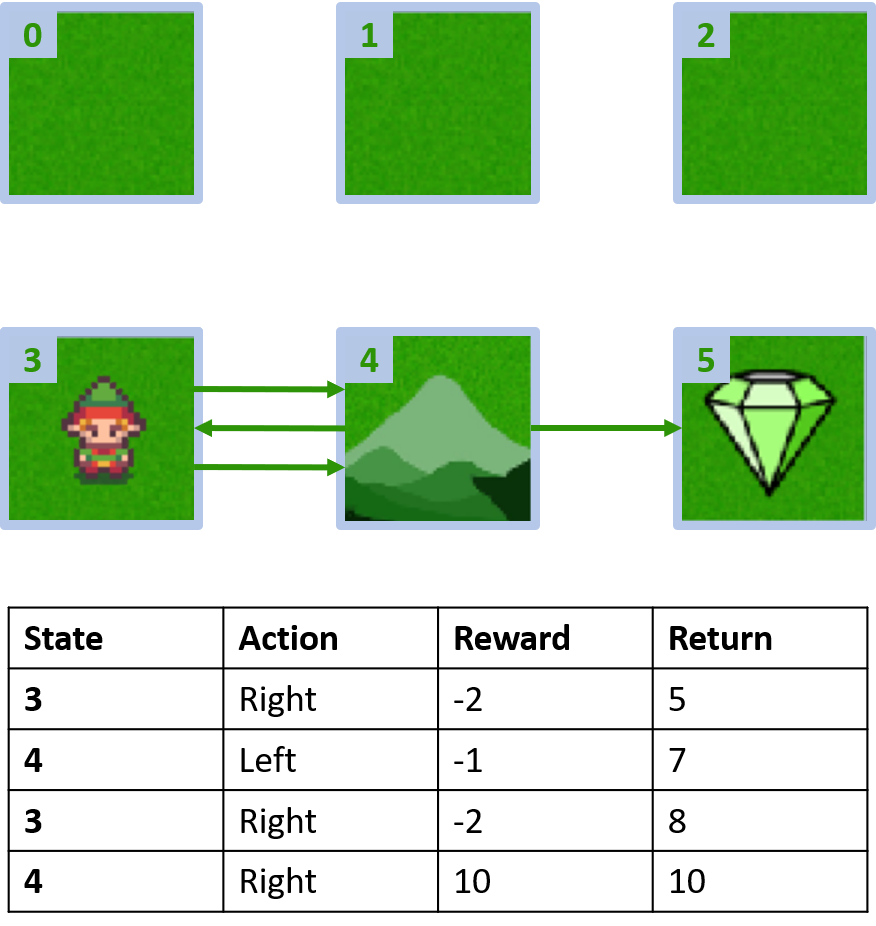
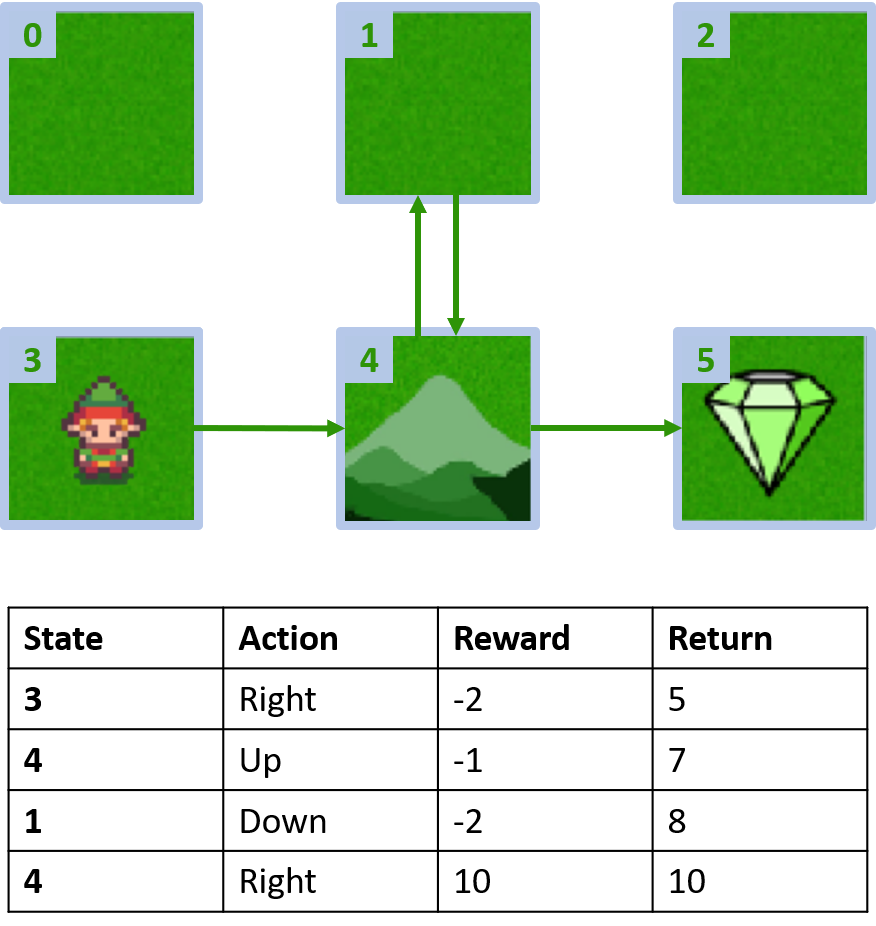
Custom grid world

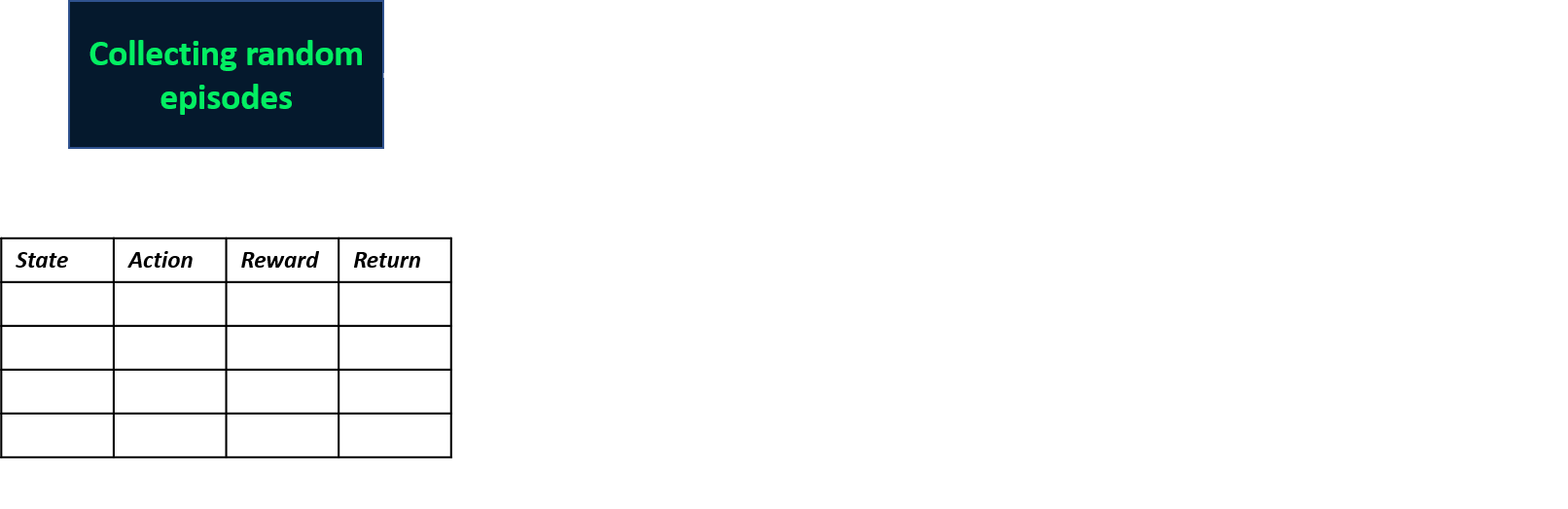
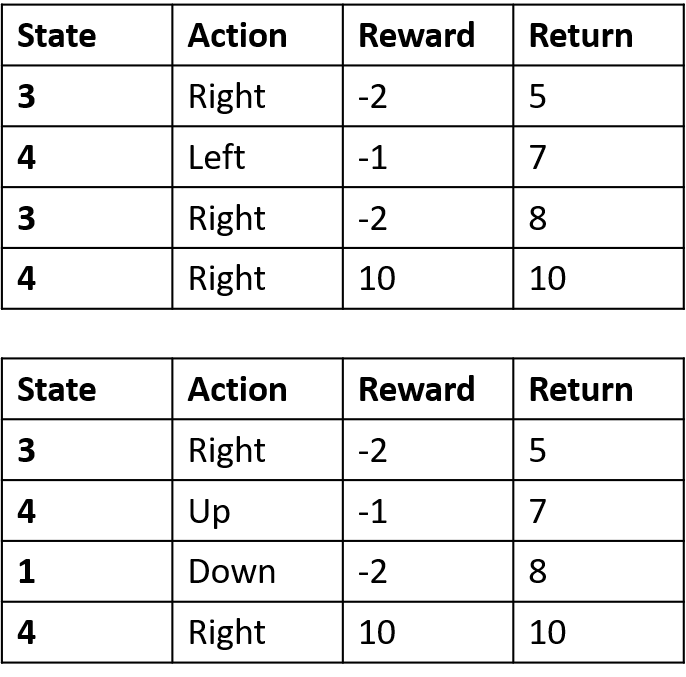
Collecting two episodes
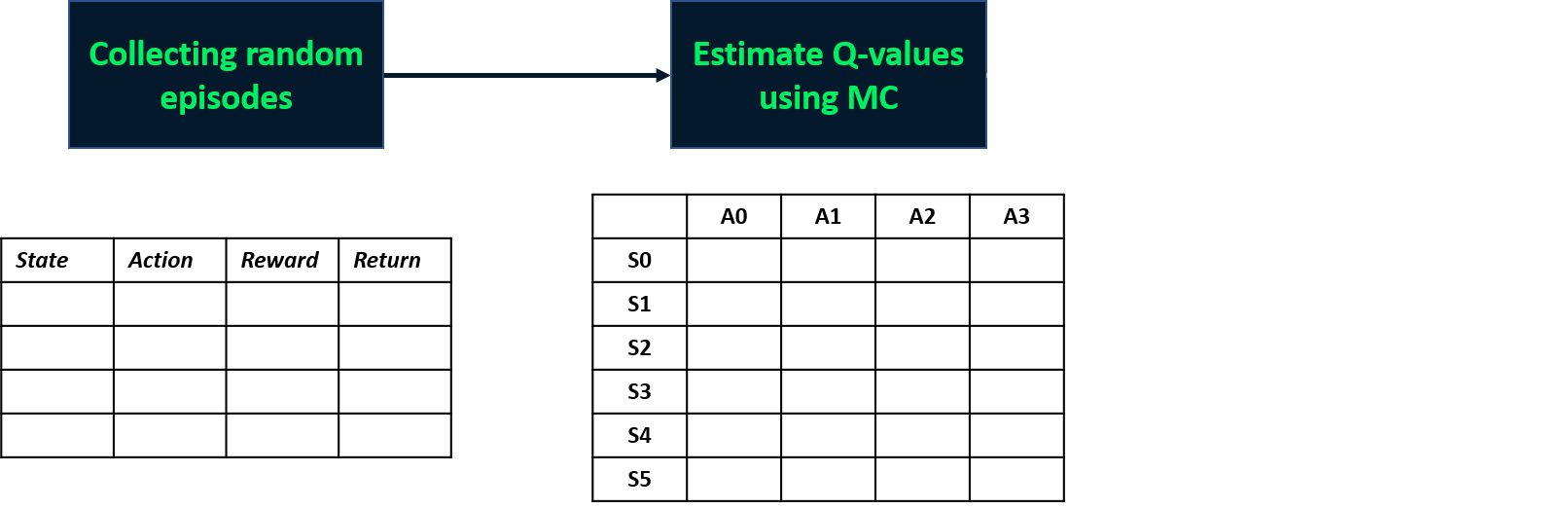
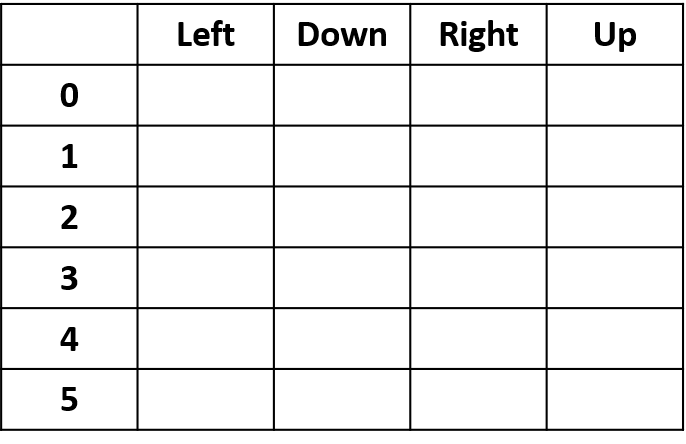
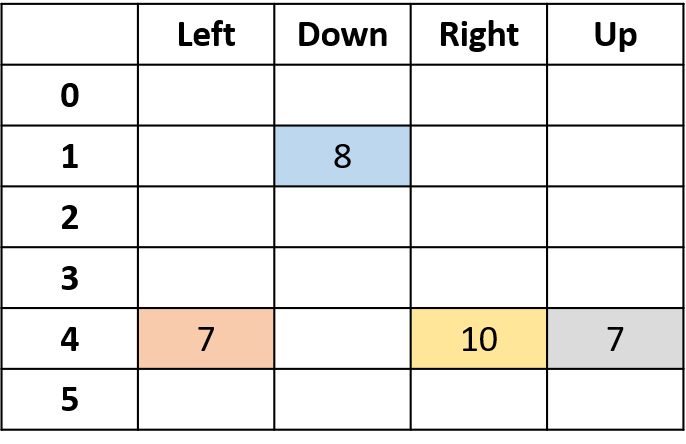
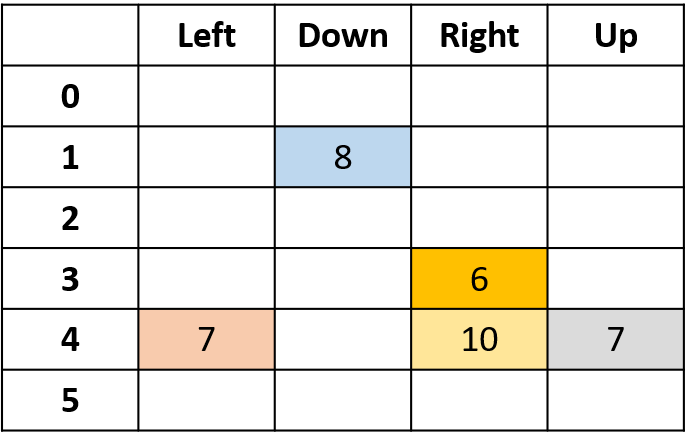
Estimating Q-values
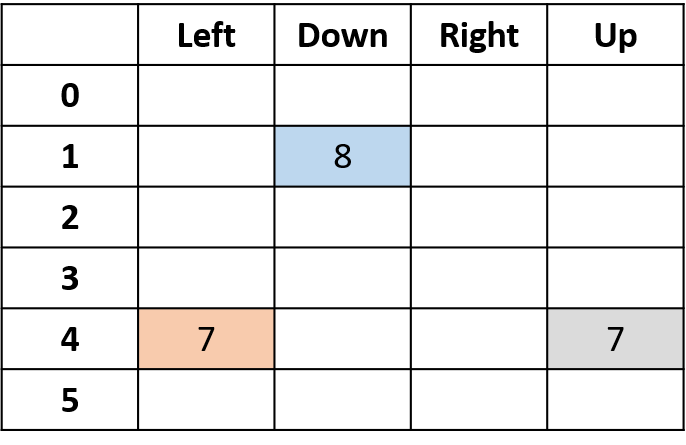
- Q-table: table for Q-values
Q(4, left), Q(4, up), and Q(1, down)
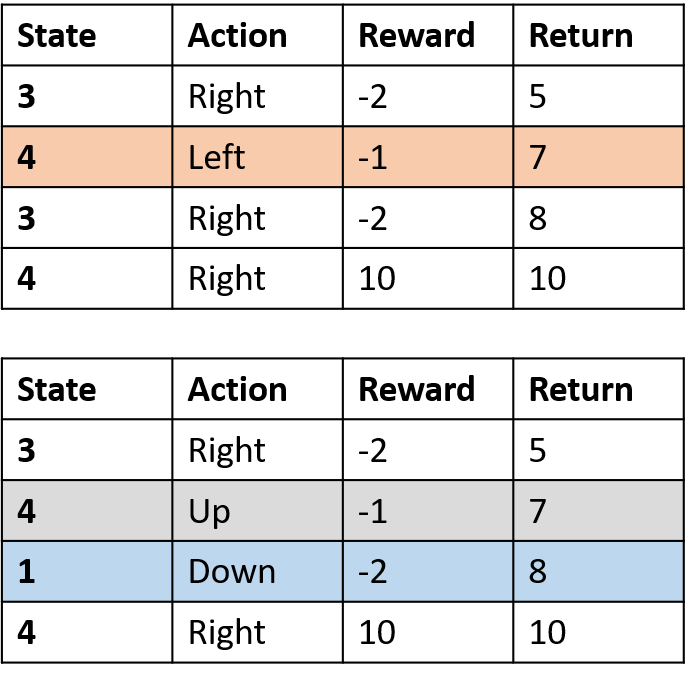
- (s,a) appears once -> fill with return
Q(4, right)
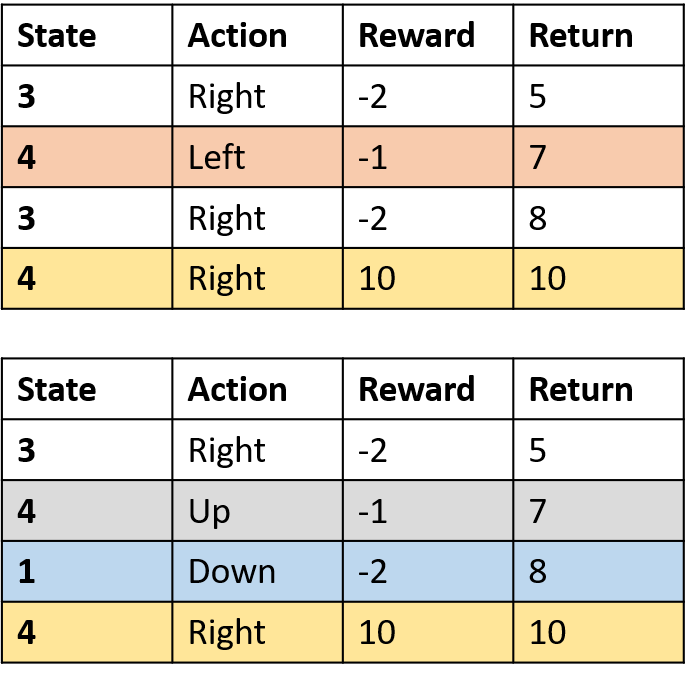
- (s,a) occurs once per episode -> average
Q(3, right) - first-visit Monte Carlo
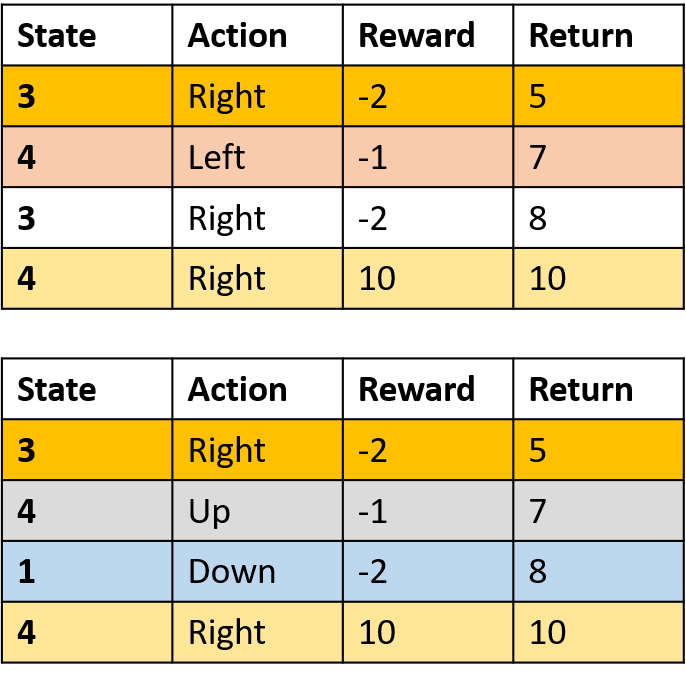
- Average first visit to (s,a) within episodes
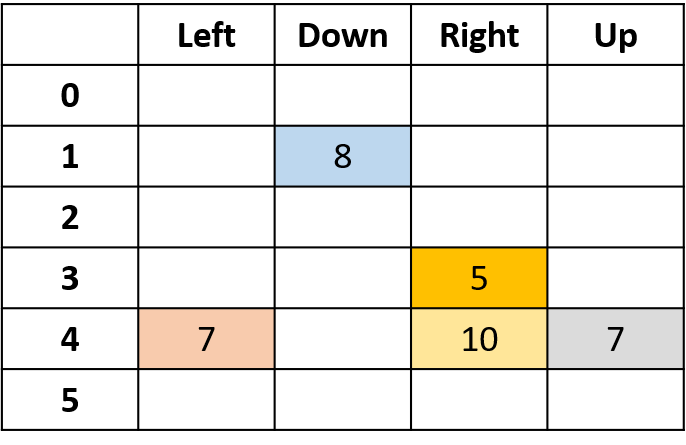
Q(3, right) - every-visit Monte Carlo
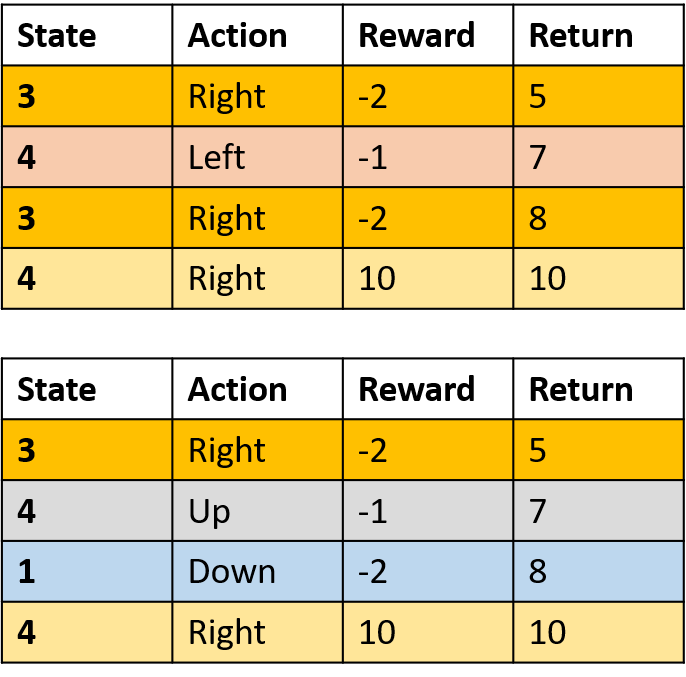
- Average every visit to (s,a) within episodes
Putting things together