DQN with experience replay
Deep Reinforcement Learning in Python

Timothée Carayol
Principal Machine Learning Engineer, Komment
Introduction to experience replay

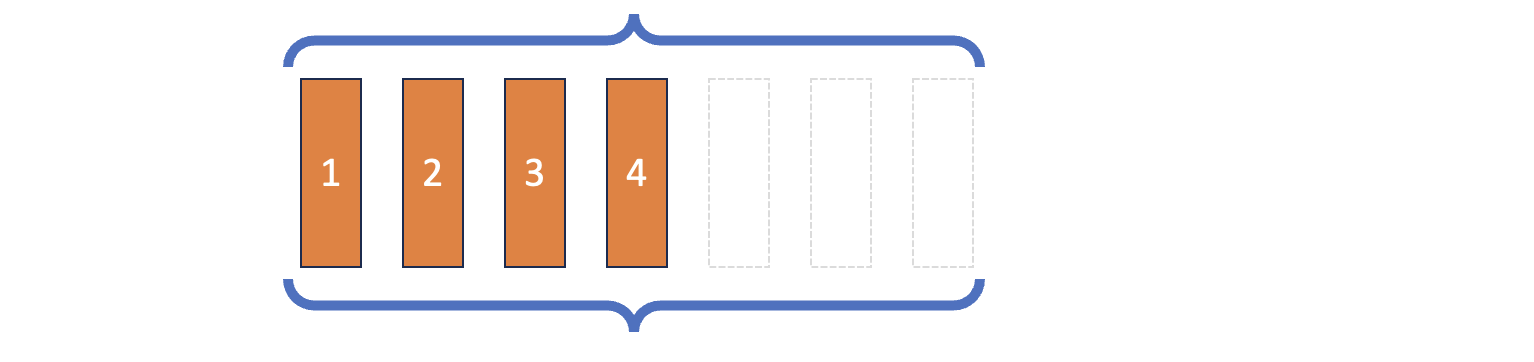
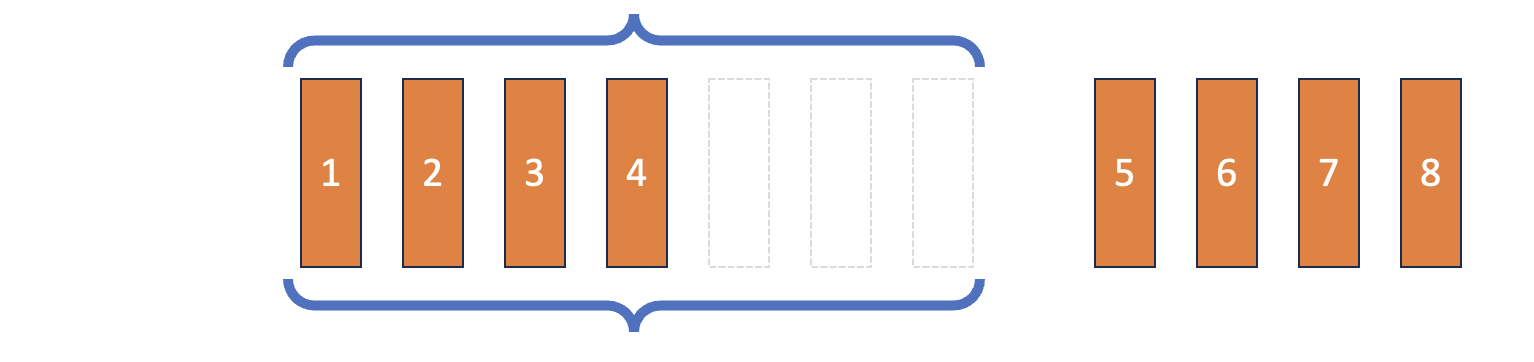
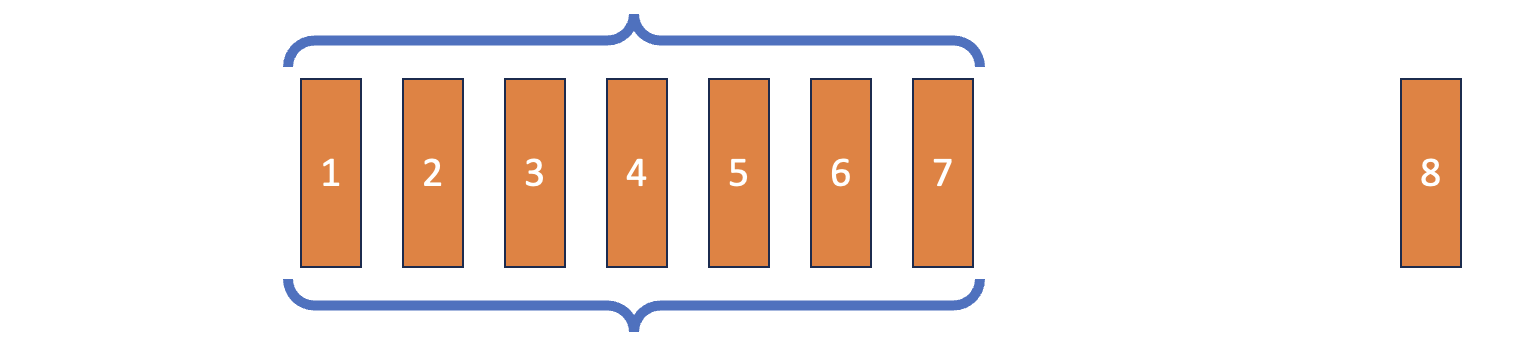
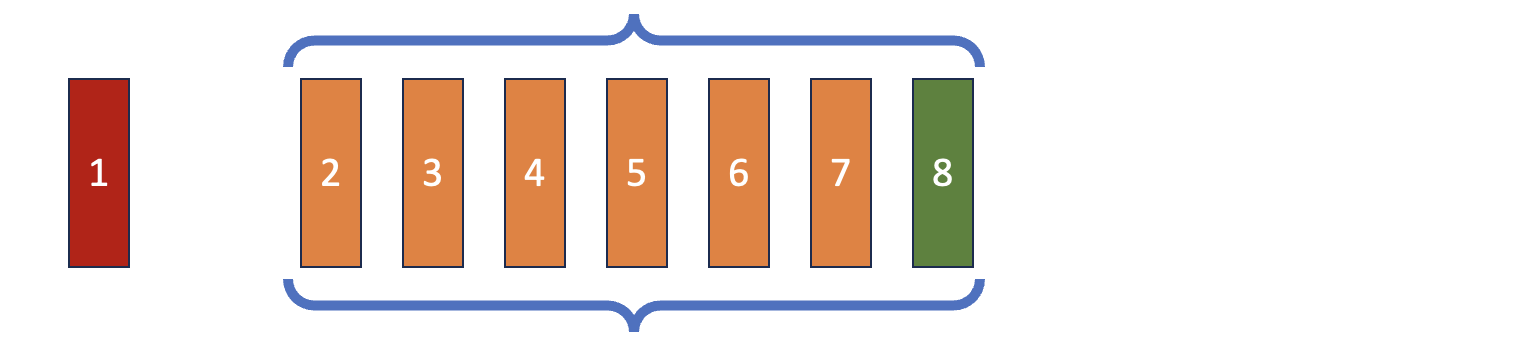
The Double-Ended Queue
Deep Reinforcement Learning in Python
Timothée Carayol
Principal Machine Learning Engineer, Komment

