Batch updates in policy gradient
Deep Reinforcement Learning in Python

Timothée Carayol
Principal Machine Learning Engineer, Komment
Stepwise vs batch gradient updates
Stepwise vs batch gradient updates
Stepwise vs batch gradient updates
Stepwise vs batch gradient updates
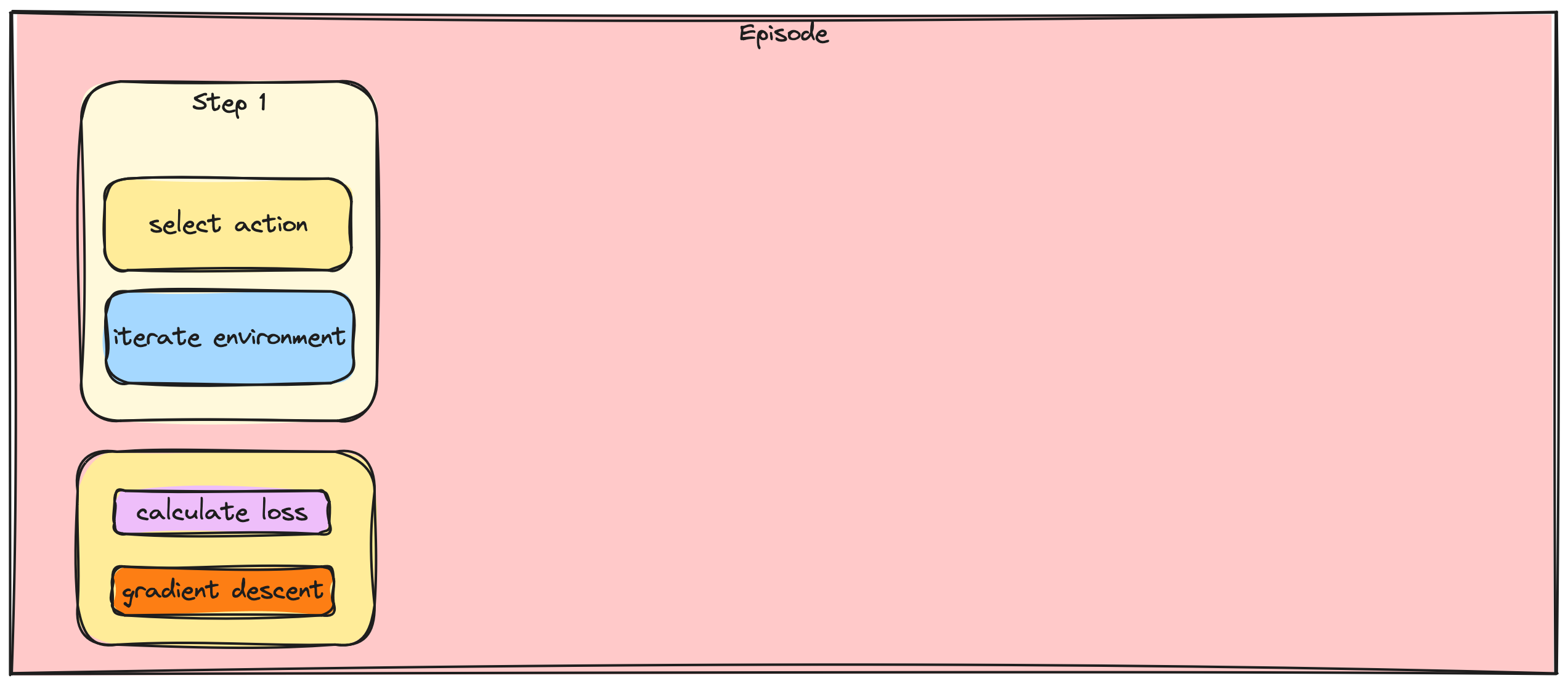
Stepwise vs batch gradient updates
Stepwise vs batch gradient updates
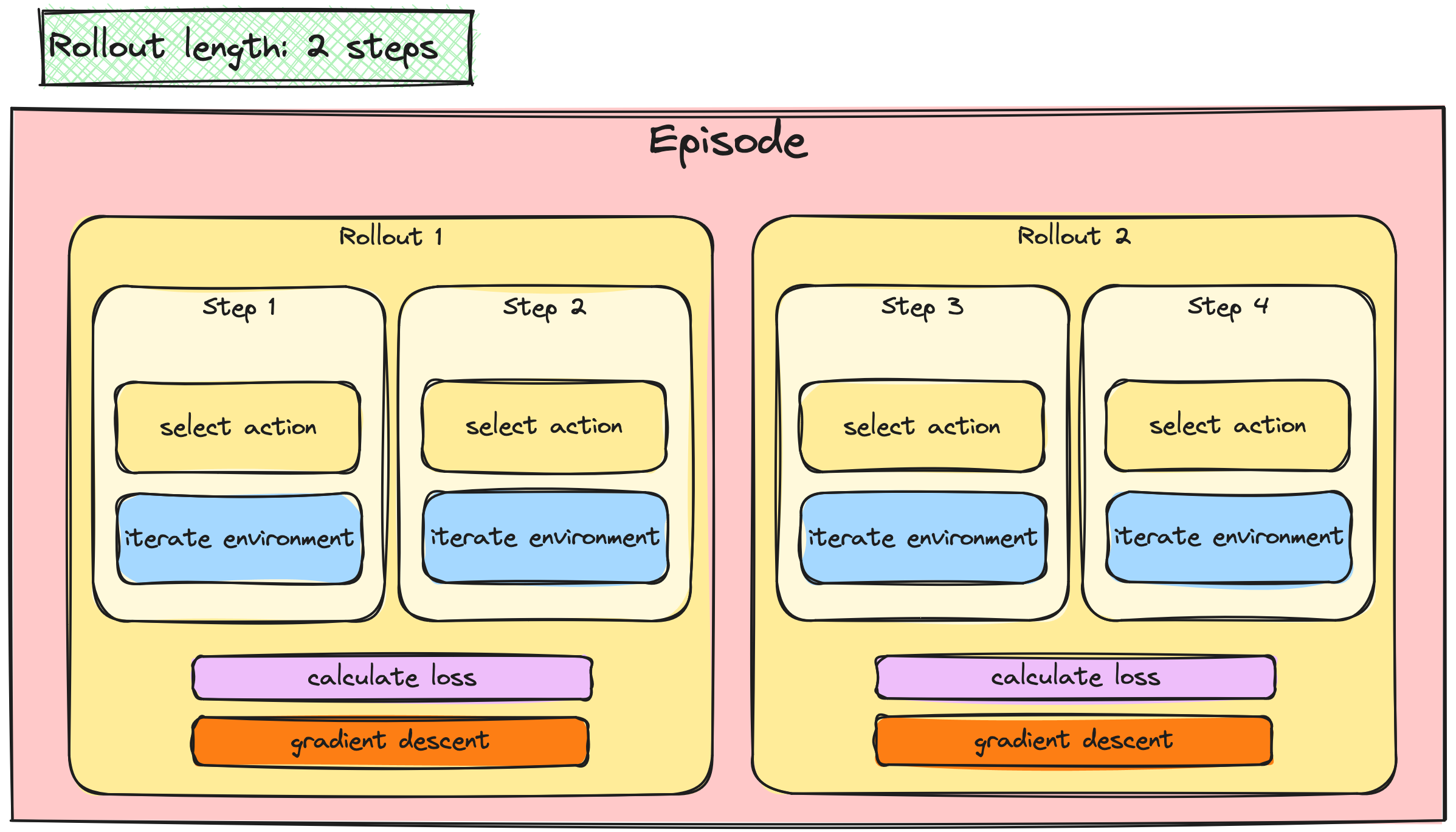
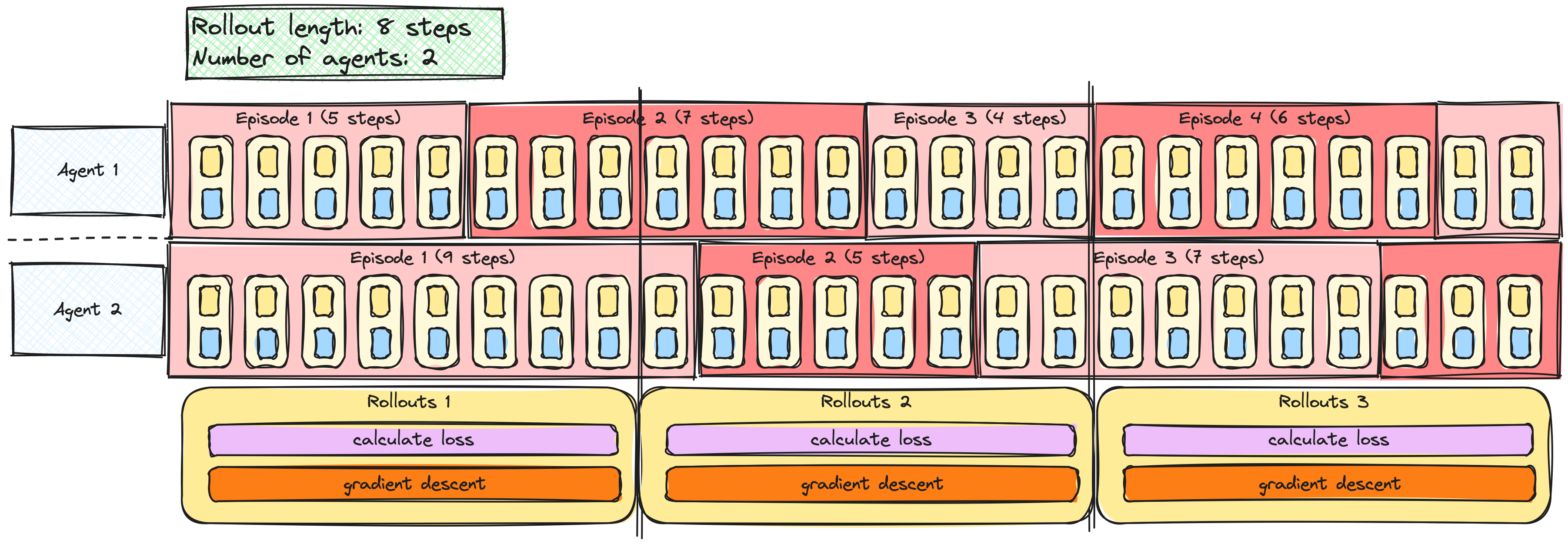
Batching the A2C / PPO updates
Batching the A2C / PPO updates
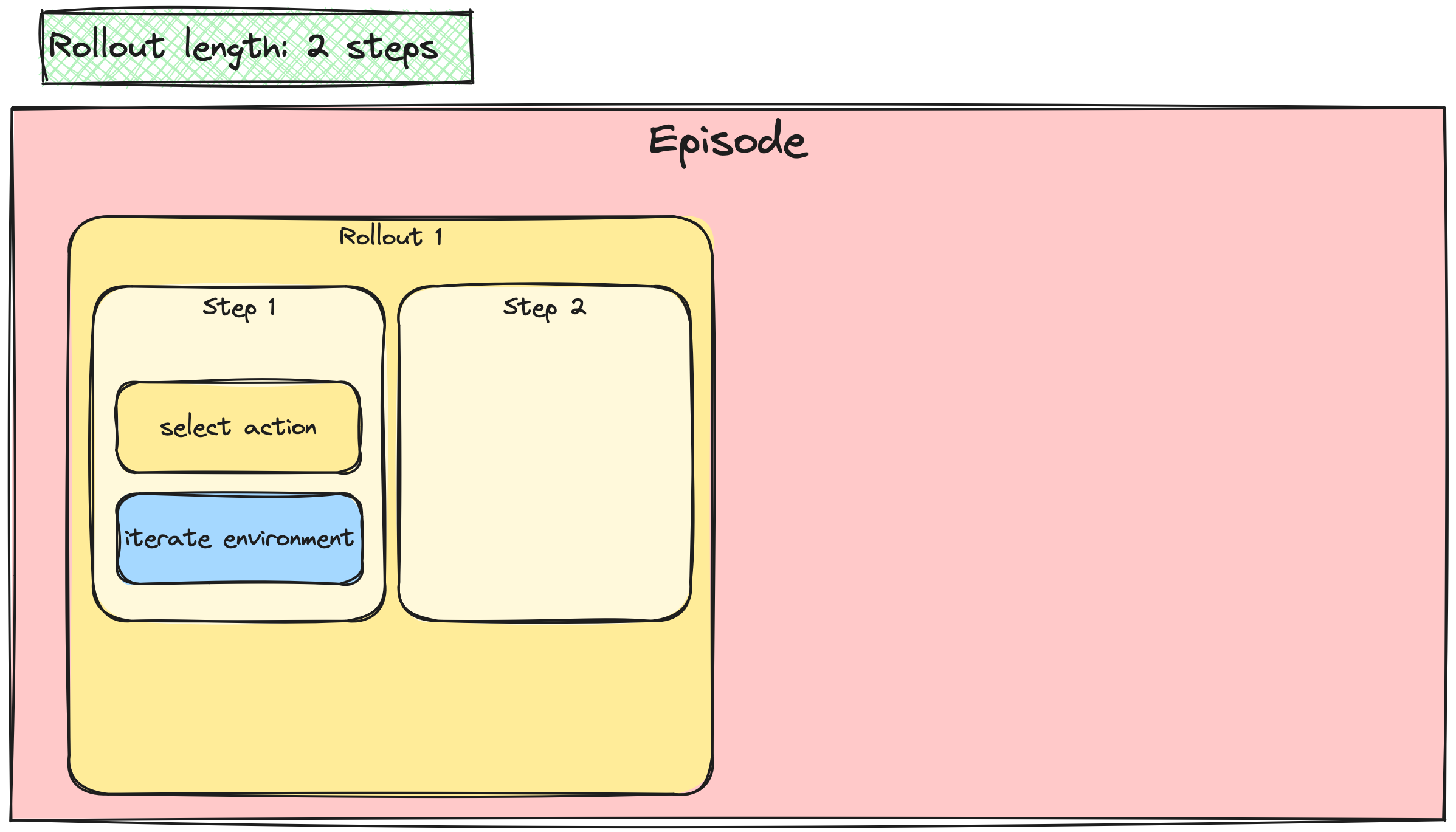
Batching the A2C / PPO updates
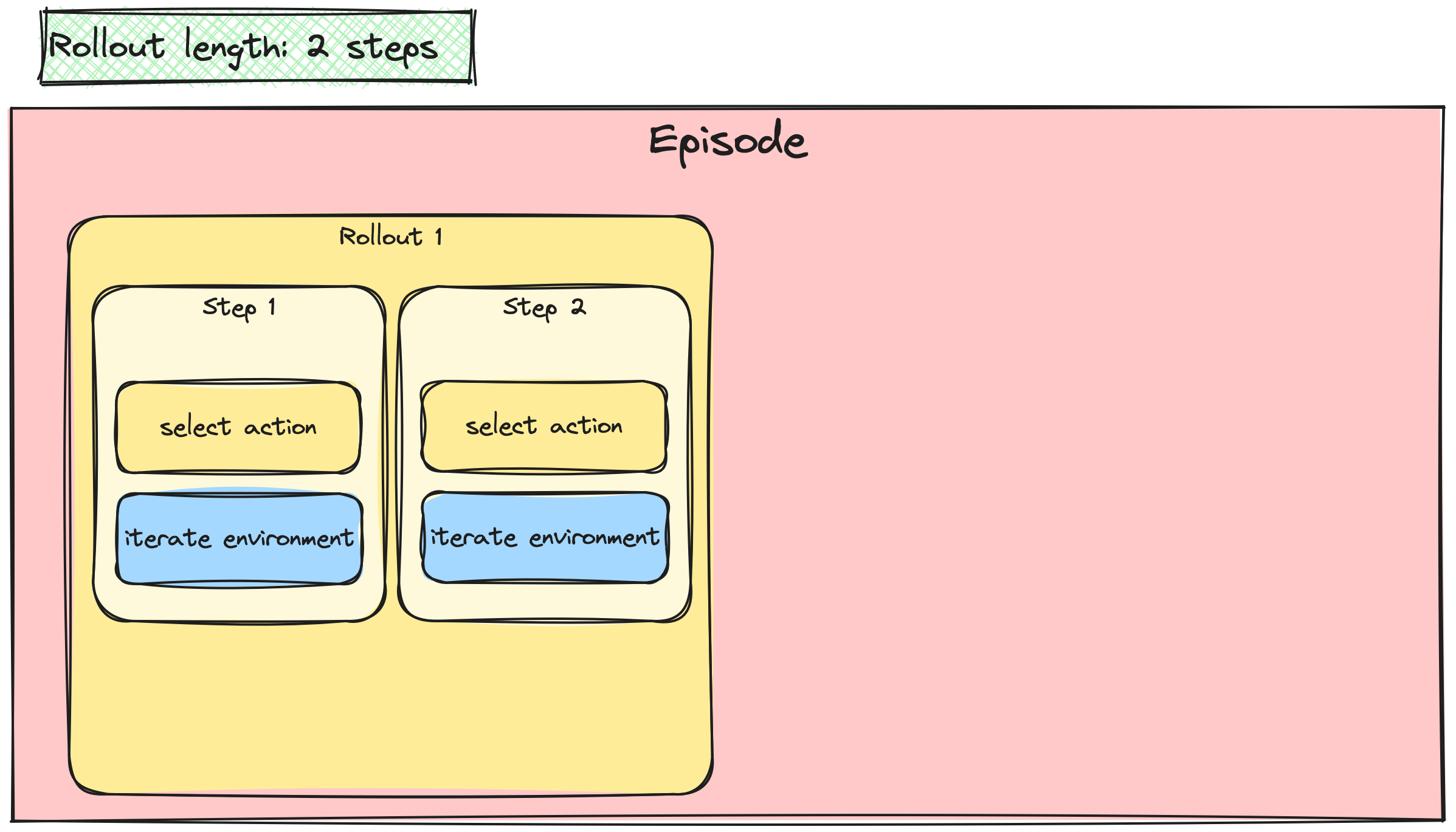
Batching the A2C / PPO updates
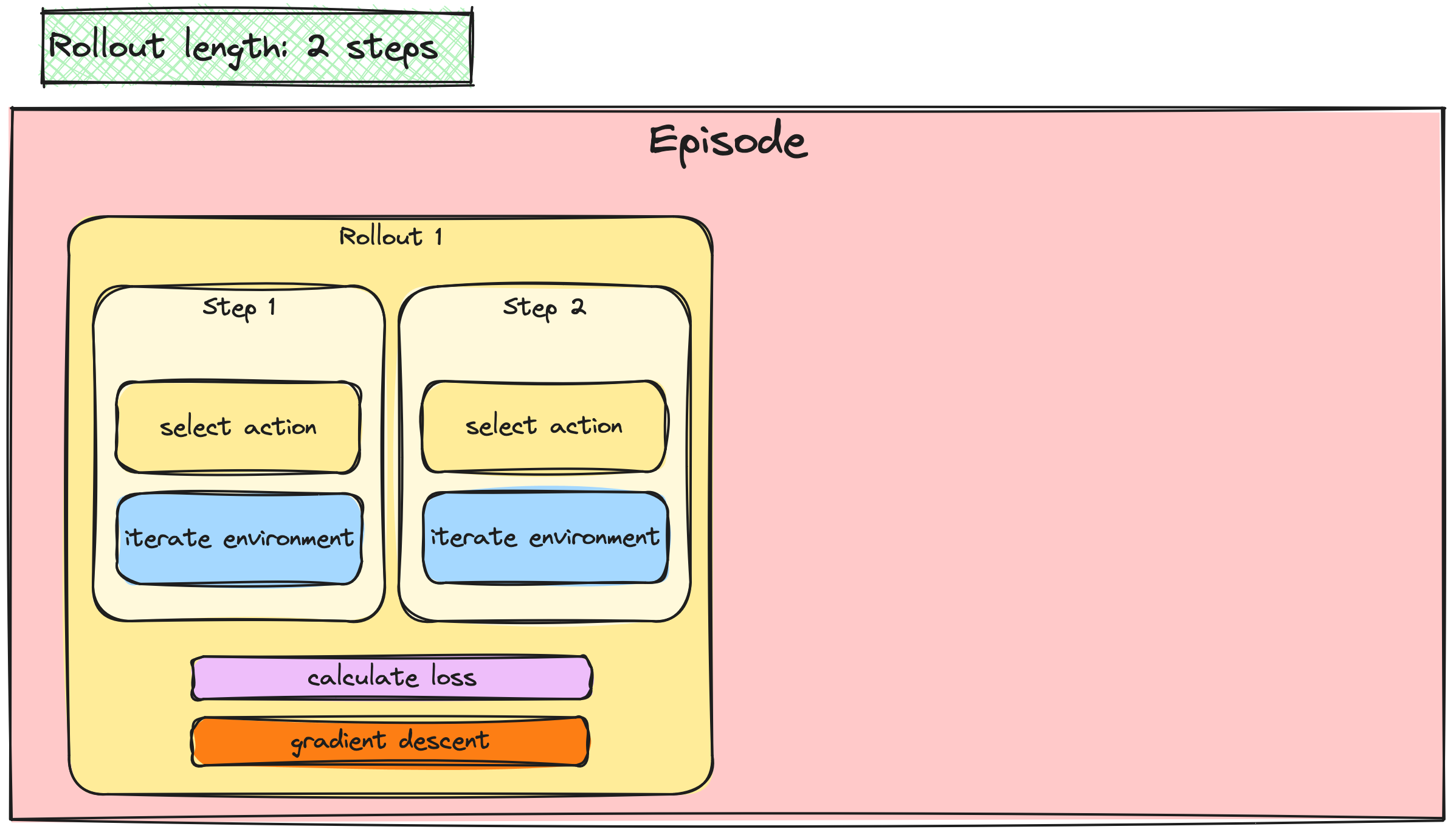
Batching the A2C / PPO updates
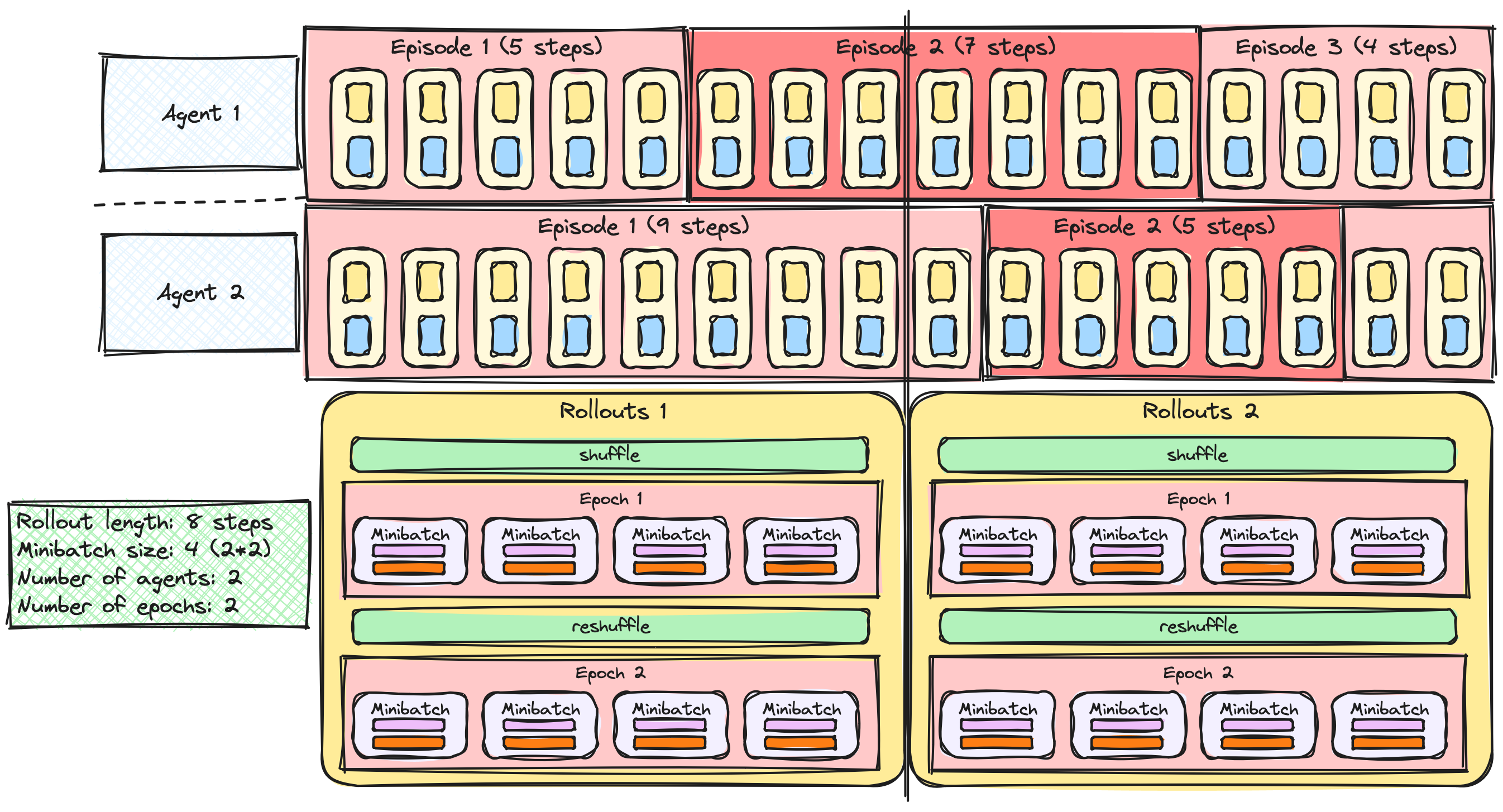
A2C / PPO with multiple agents
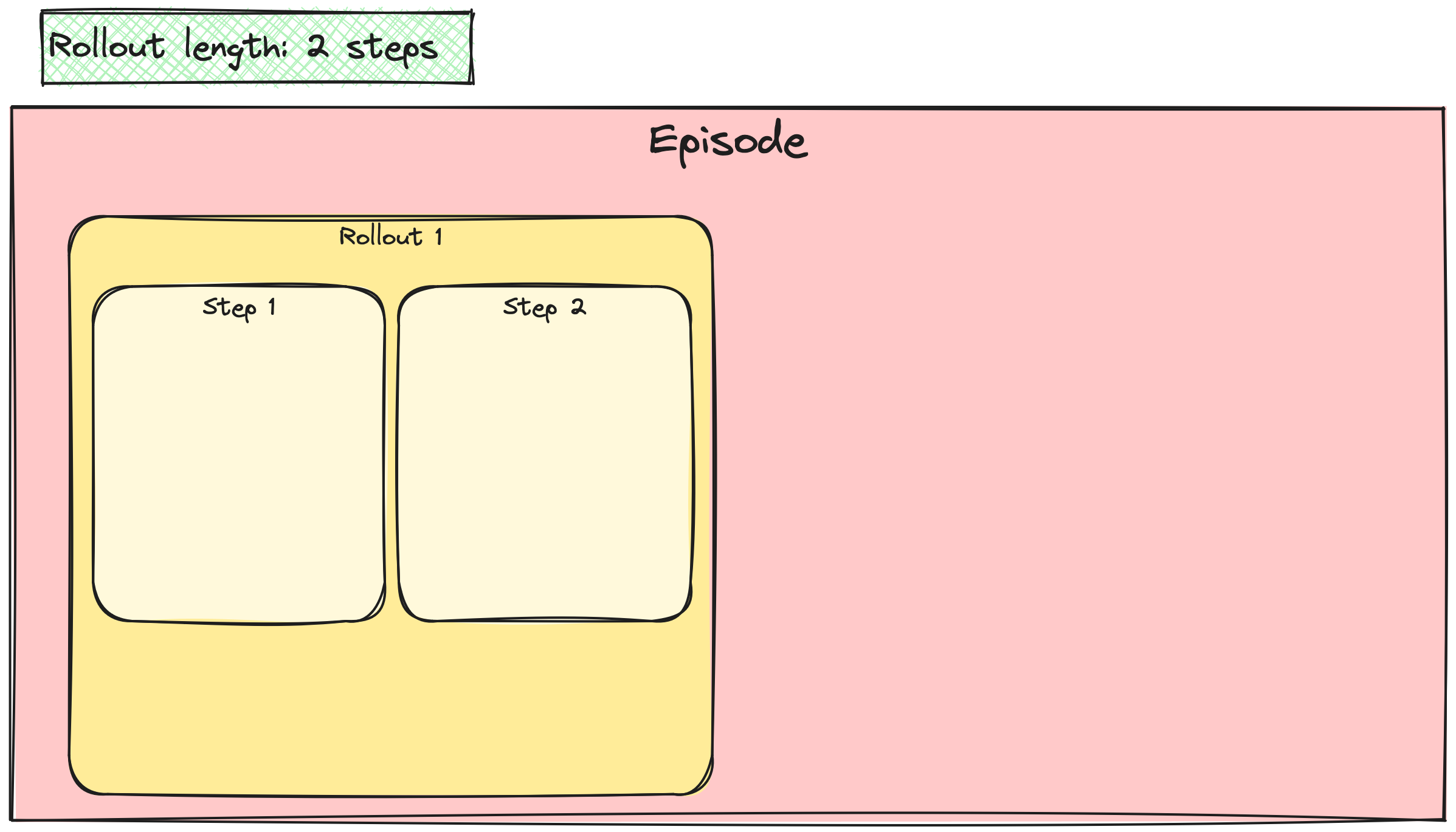
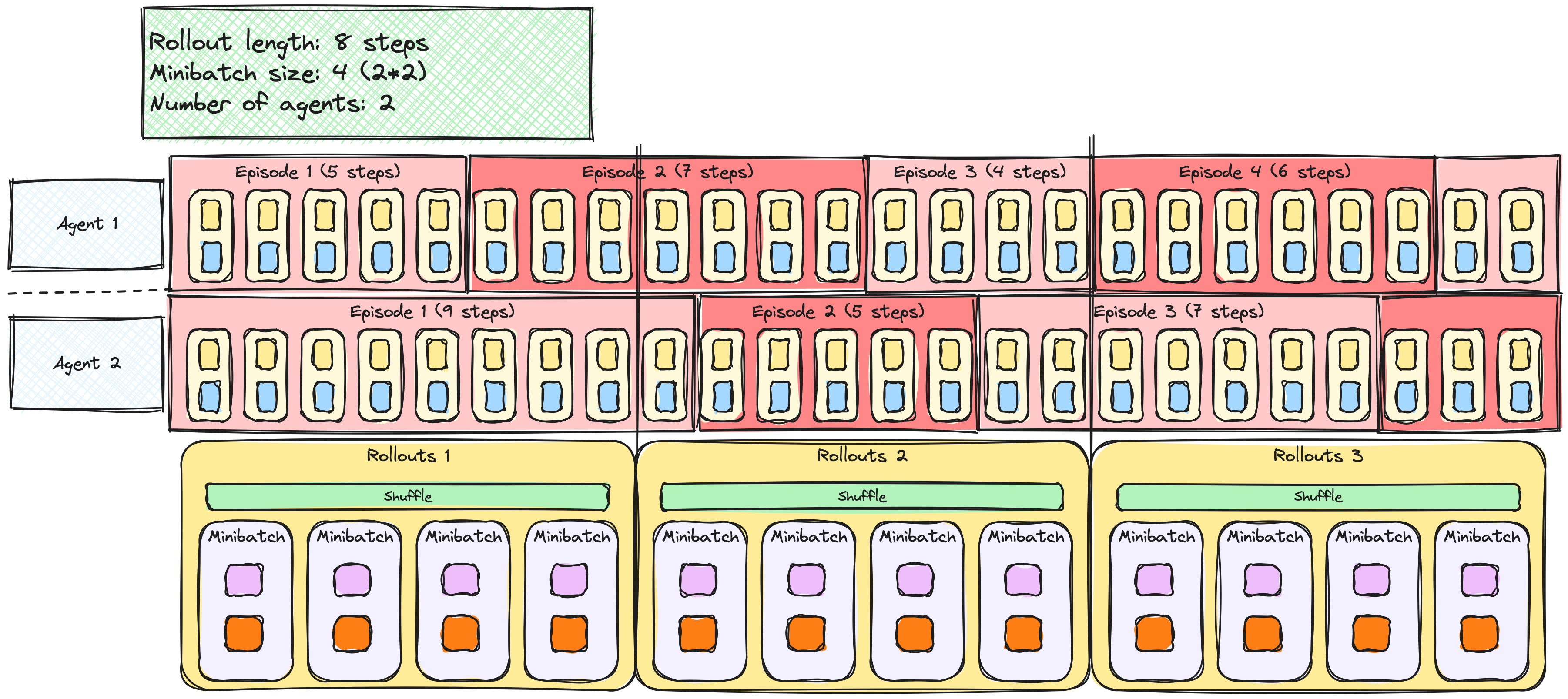
Rollouts and minibatches
PPO with multiple epochs