Double DQN
Deep Reinforcement Learning in Python

Timothée Carayol
Principal Machine Learning Engineer, Komment
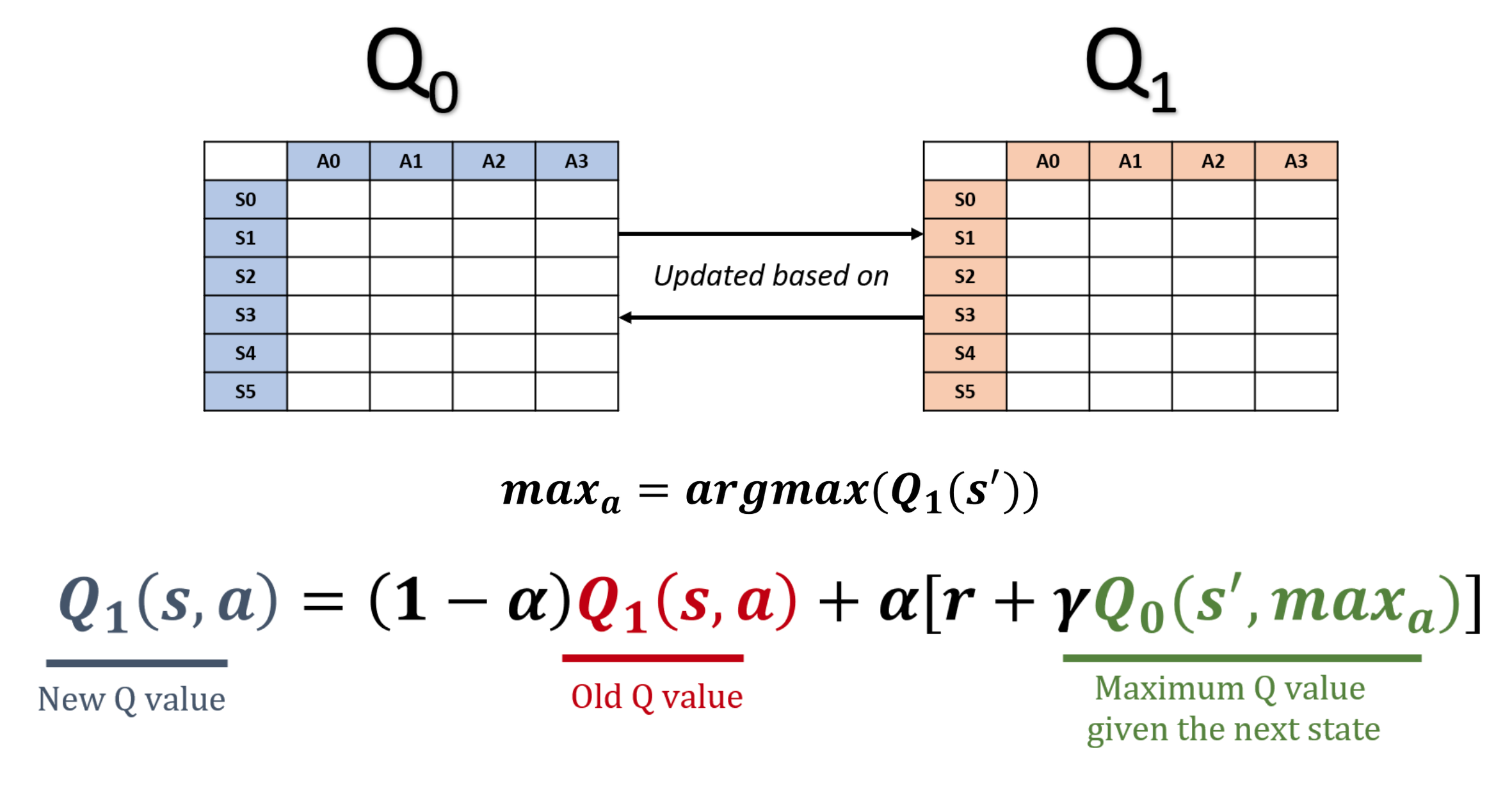
Double Q-learning
- Q-learning overestimates Q-values, compromising learning efficiency
- This is due to maximization bias
- Double Q-Learning eliminates bias by decoupling action selection and value estimation
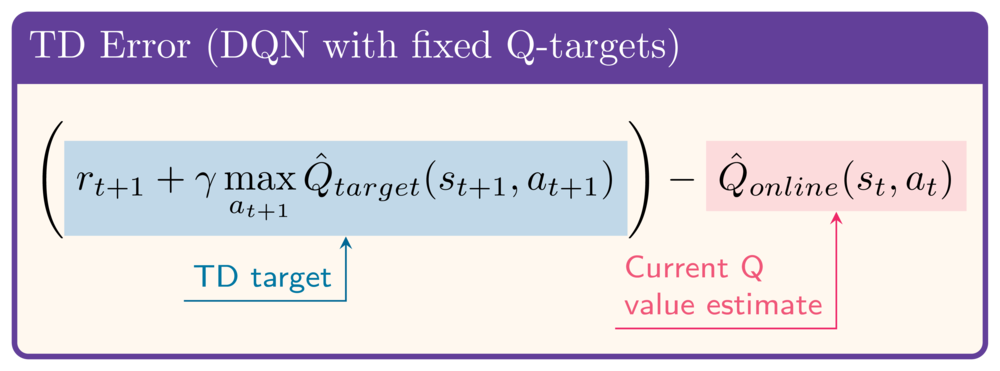
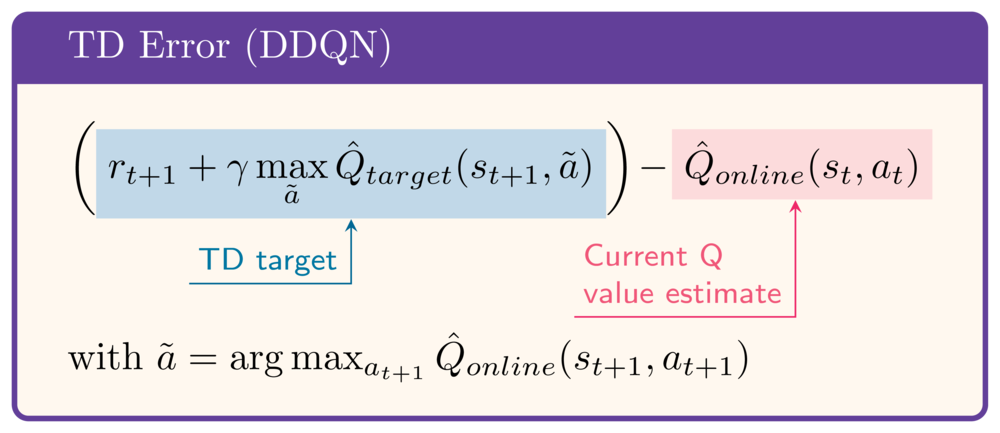
The idea behind DDQN
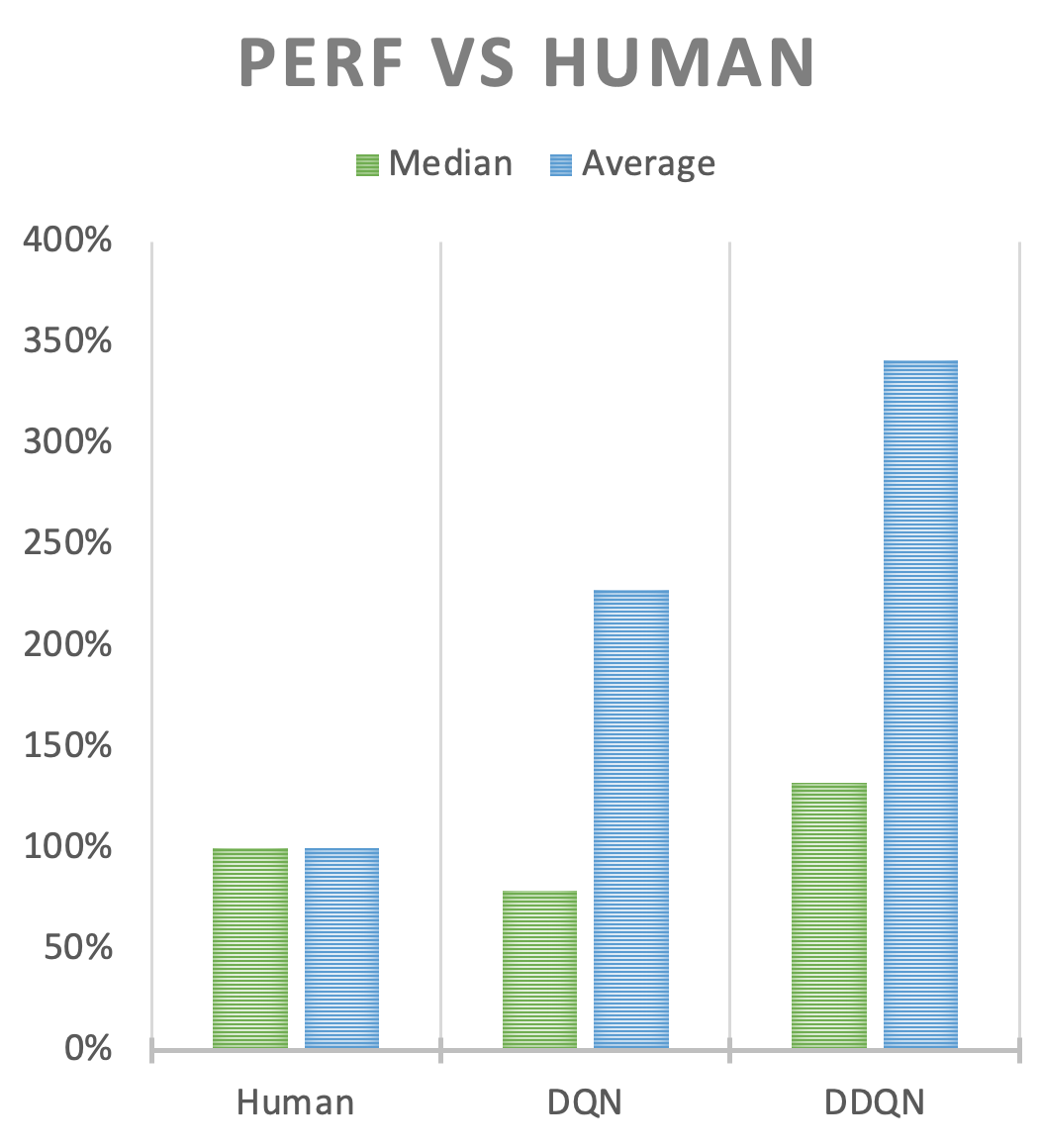
DDQN performance
1 https://arxiv.org/abs/2303.11634

