The barebone DQN algorithm
Deep Reinforcement Learning in Python

Timothée Carayol
Principal Machine Learning Engineer, Komment
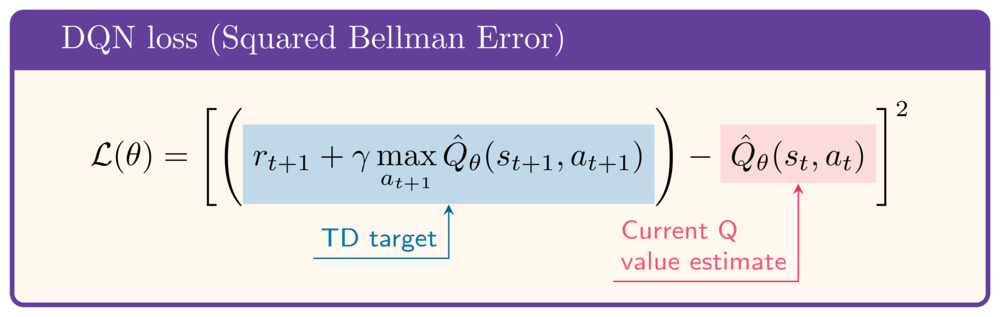
The Barebone DQN loss function
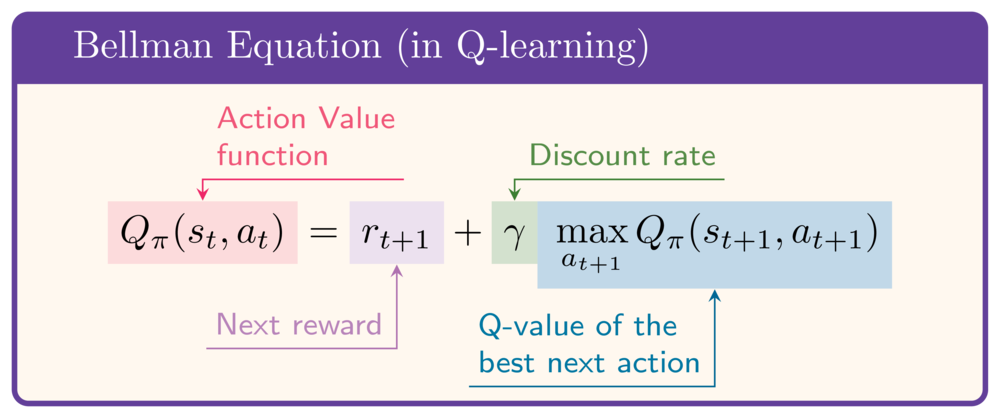
- Action-Value function satisfies Bellman Equation
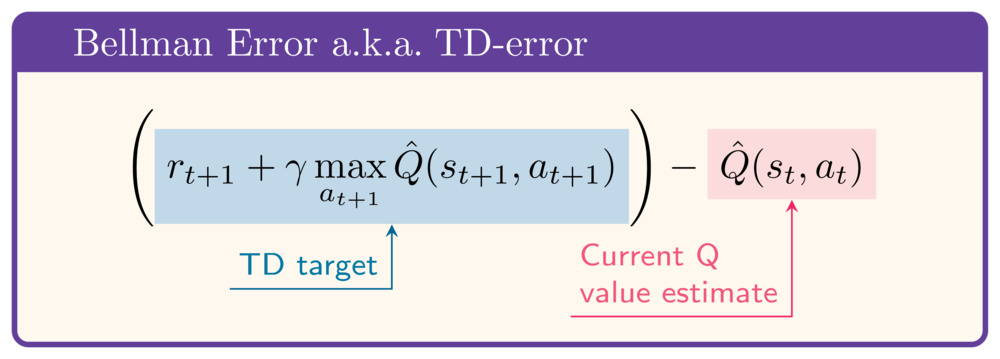
- Idea: minimize the difference between both sides a.k.a. TD-error or Bellman error
- Use Squared Bellman Error as loss function: