Introduction to deep reinforcement learning
Deep Reinforcement Learning in Python

Timothée Carayol
Principal Machine Learning Engineer, Komment
Why Deep Reinforcement Learning
The ingredients of DRL

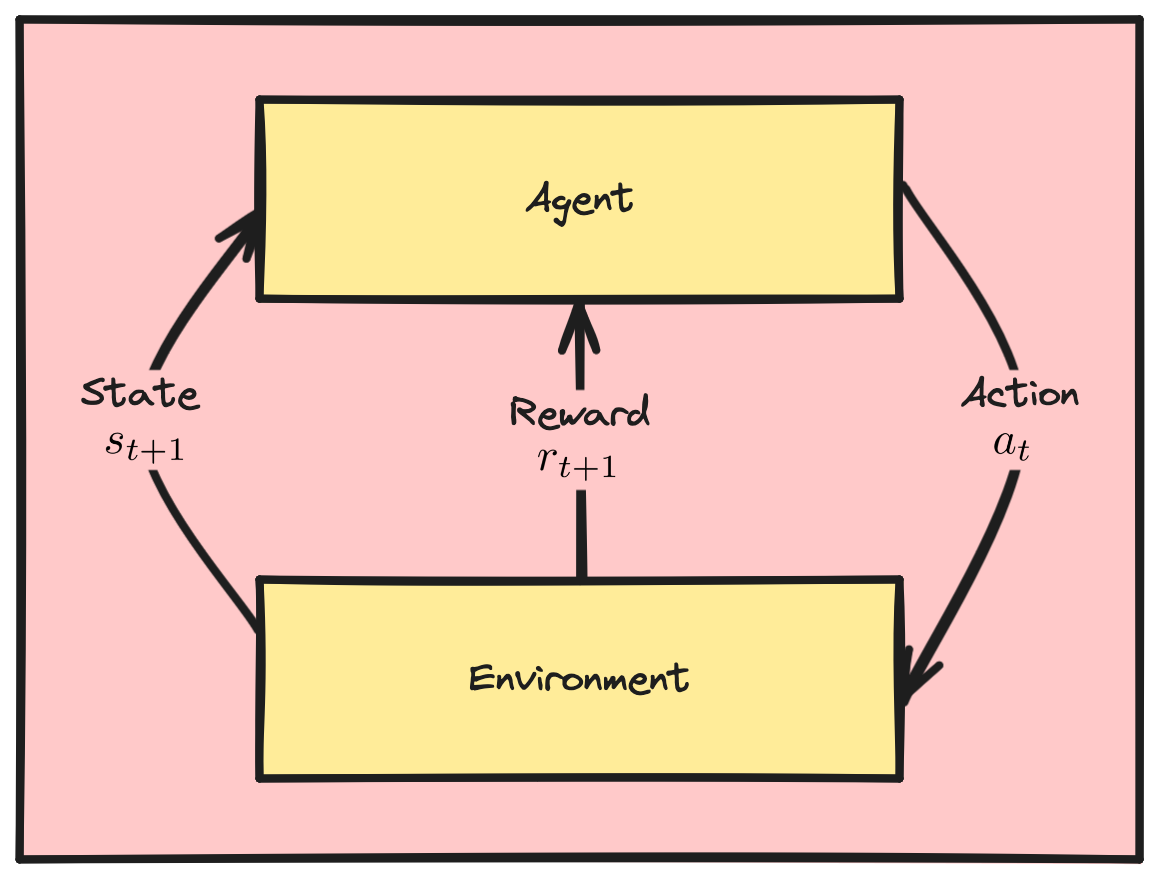
The RL framework
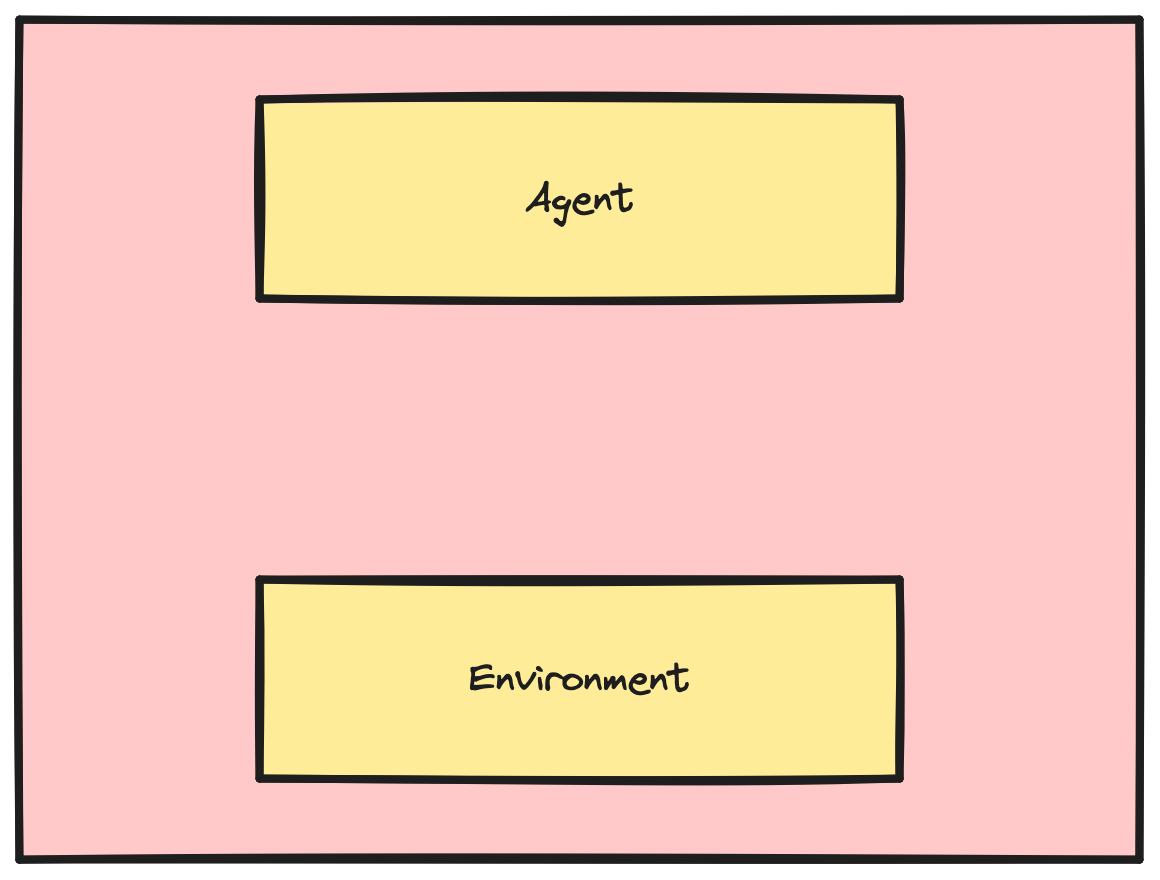
The RL framework
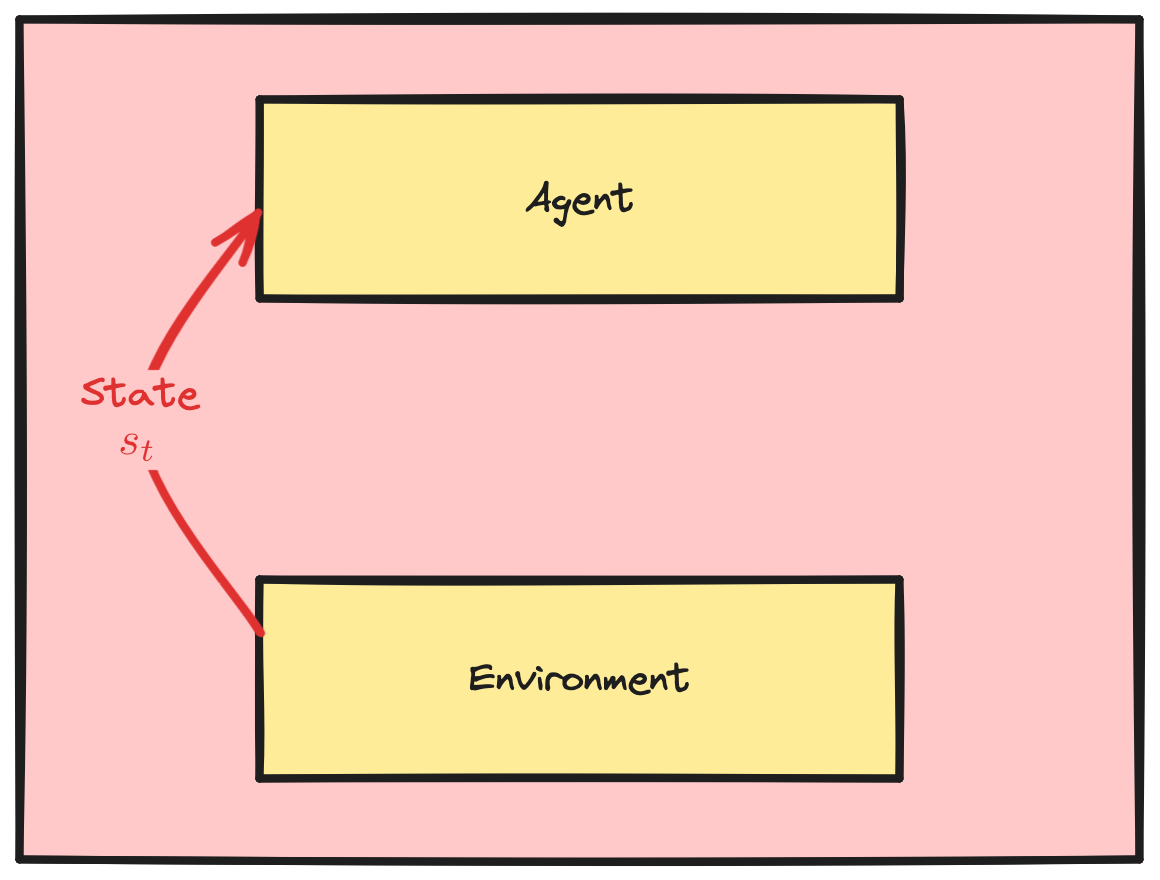
The RL framework
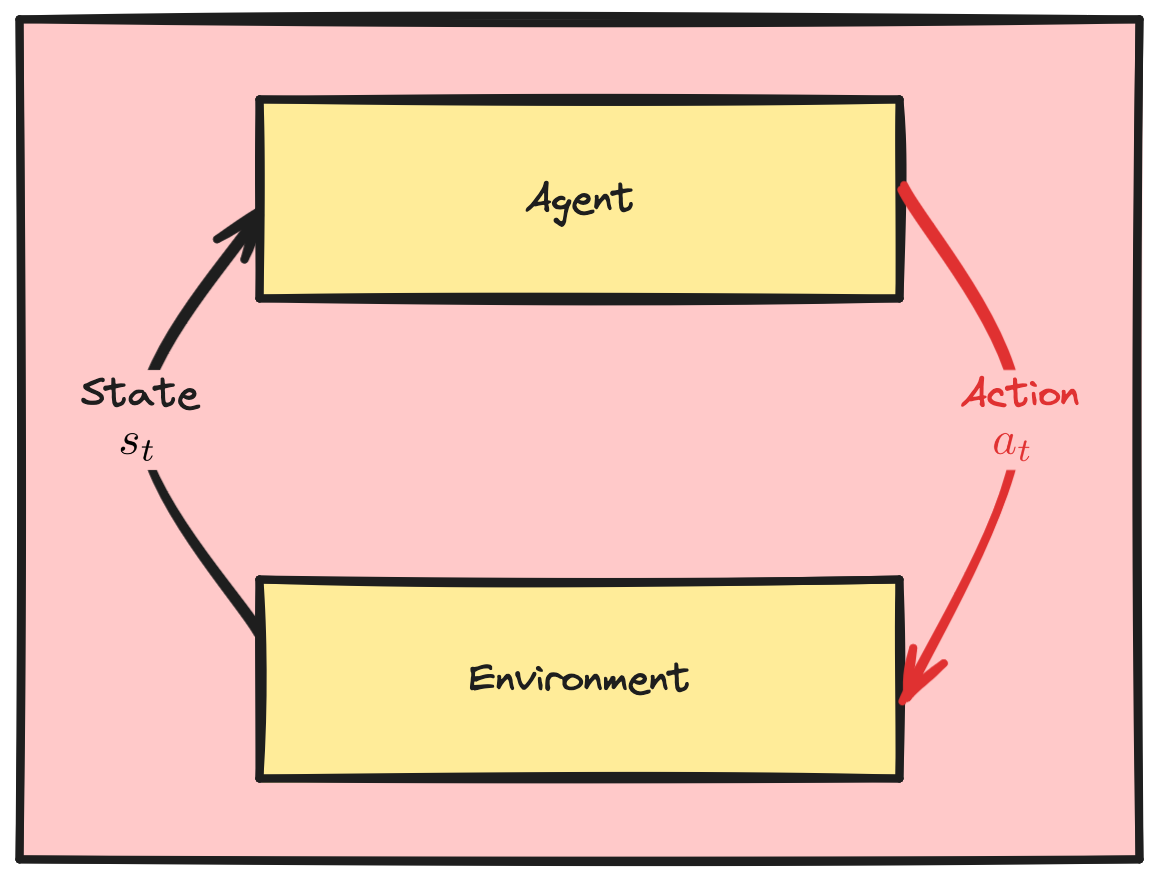
The RL framework
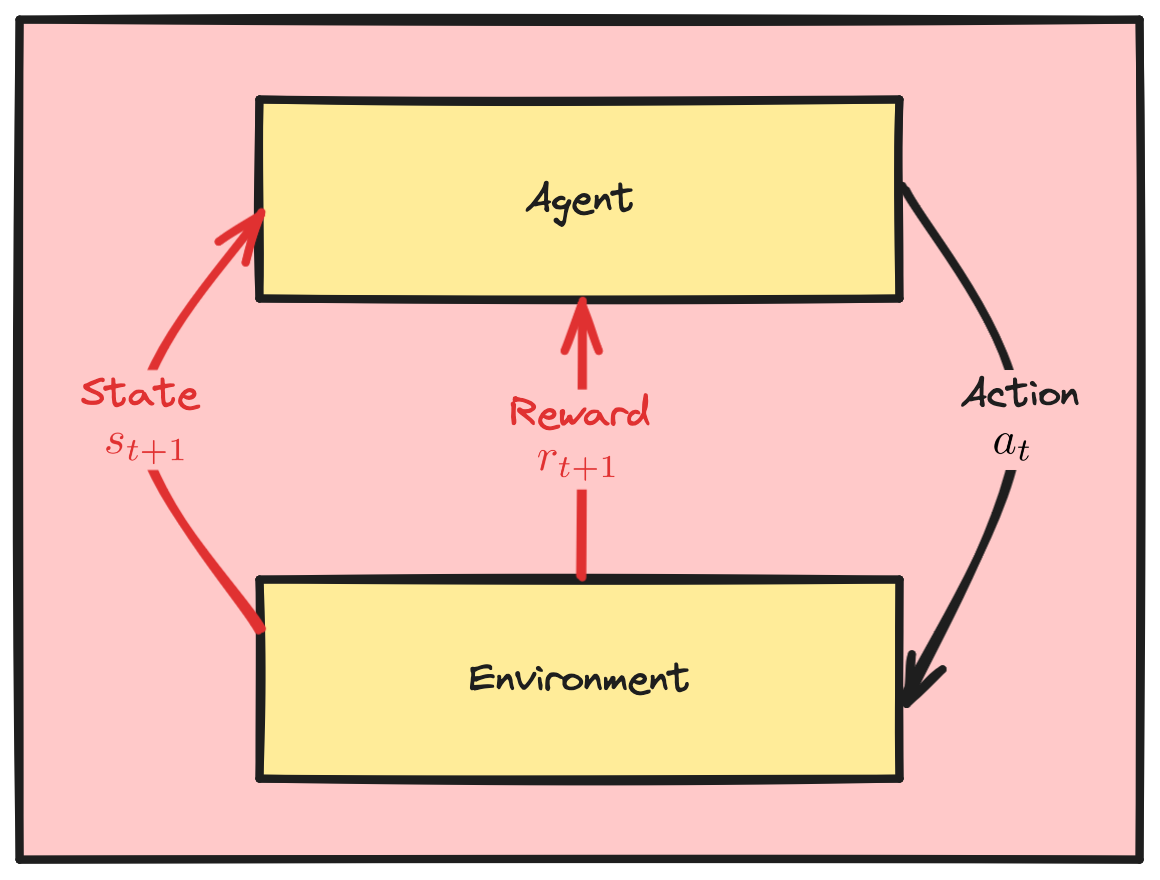
The RL framework
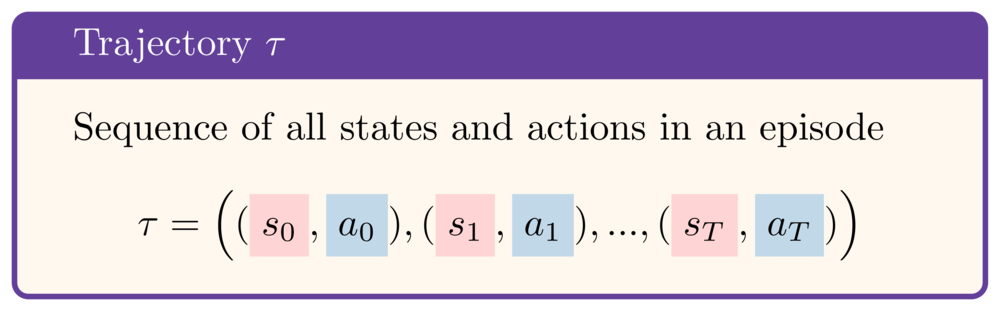
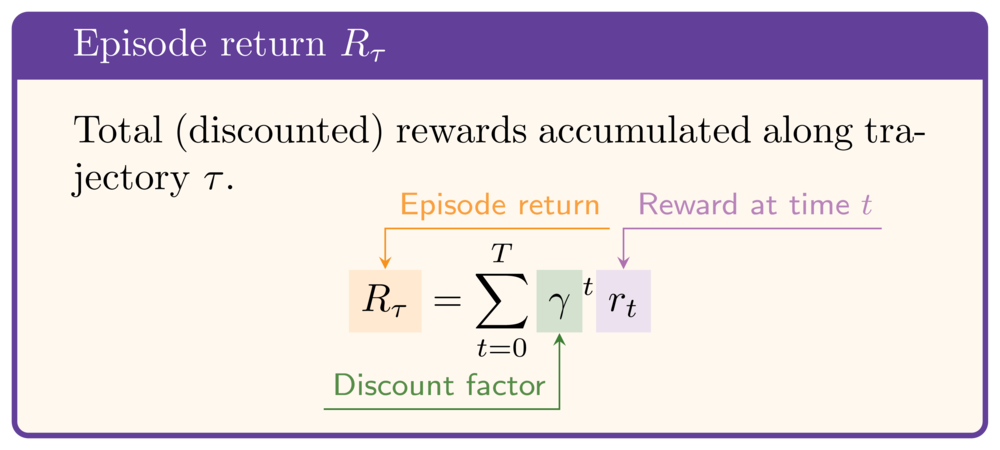
Trajectory and episode return
Coming next


