Méthodes Monte Carlo
Reinforcement Learning avec Gymnasium en Python

Fouad Trad
Machine Learning Engineer
Rappel : apprentissage basé sur modèle
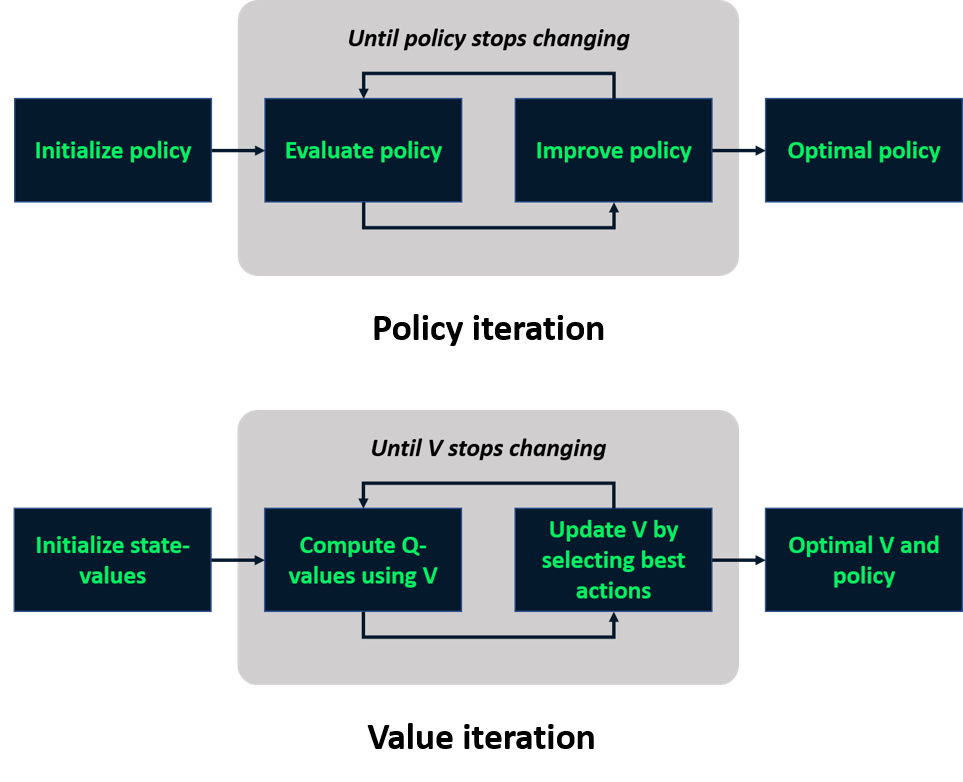
Apprentissage sans modèle

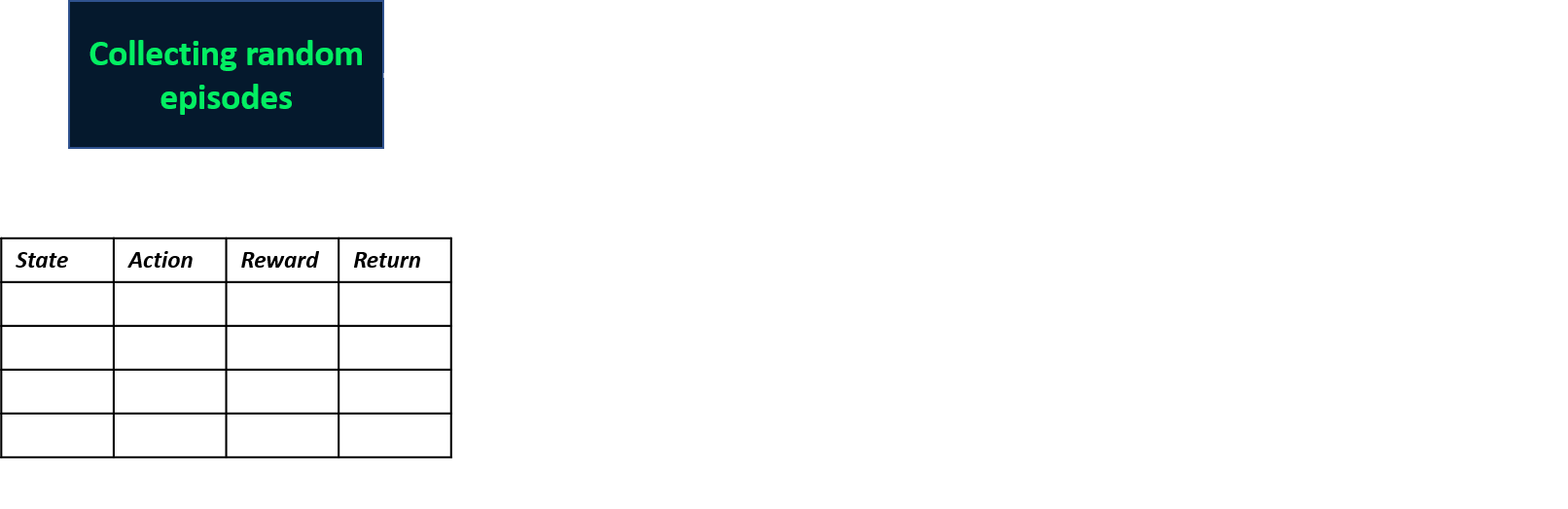
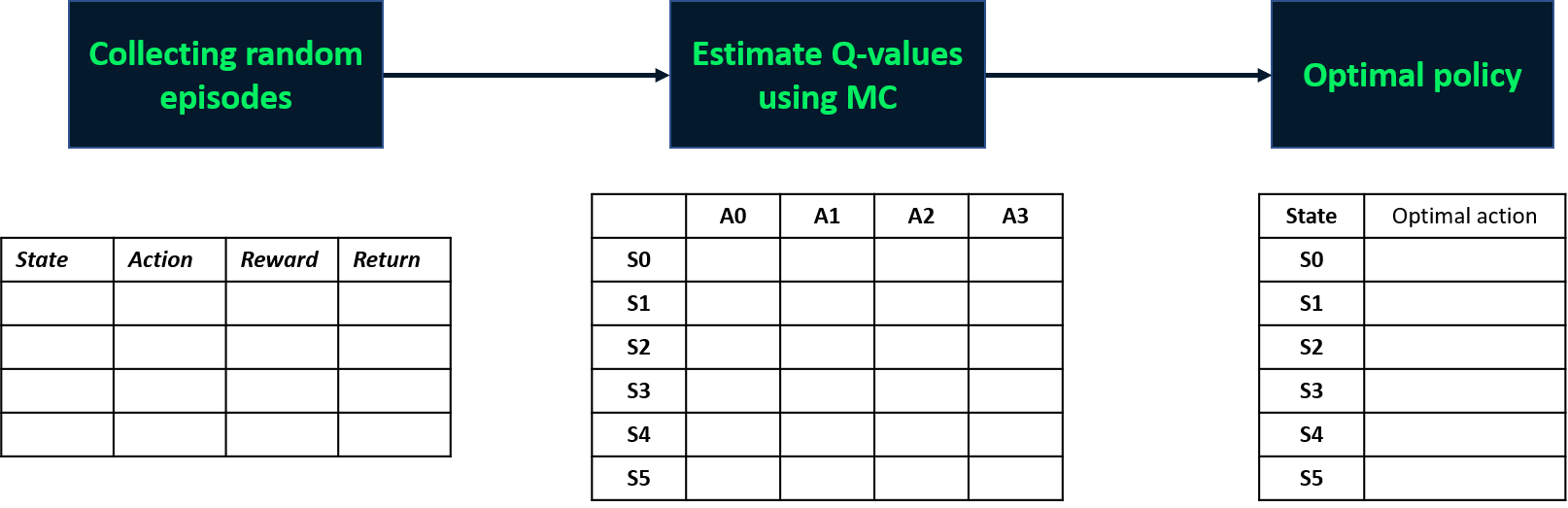
Méthodes Monte Carlo
- Techniques sans modèle
- Estiment les Q-valeurs à partir des épisodes
Méthodes Monte Carlo
- Techniques sans modèle
- Estiment les Q-valeurs à partir des épisodes
Méthodes Monte Carlo
- Techniques sans modèle
- Estiment les Q-valeurs à partir des épisodes
- Deux variantes : première visite, toutes visites
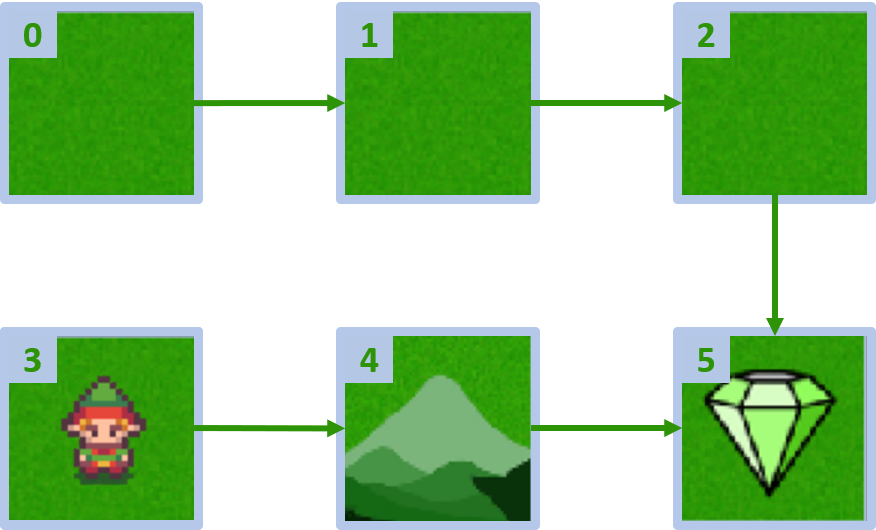
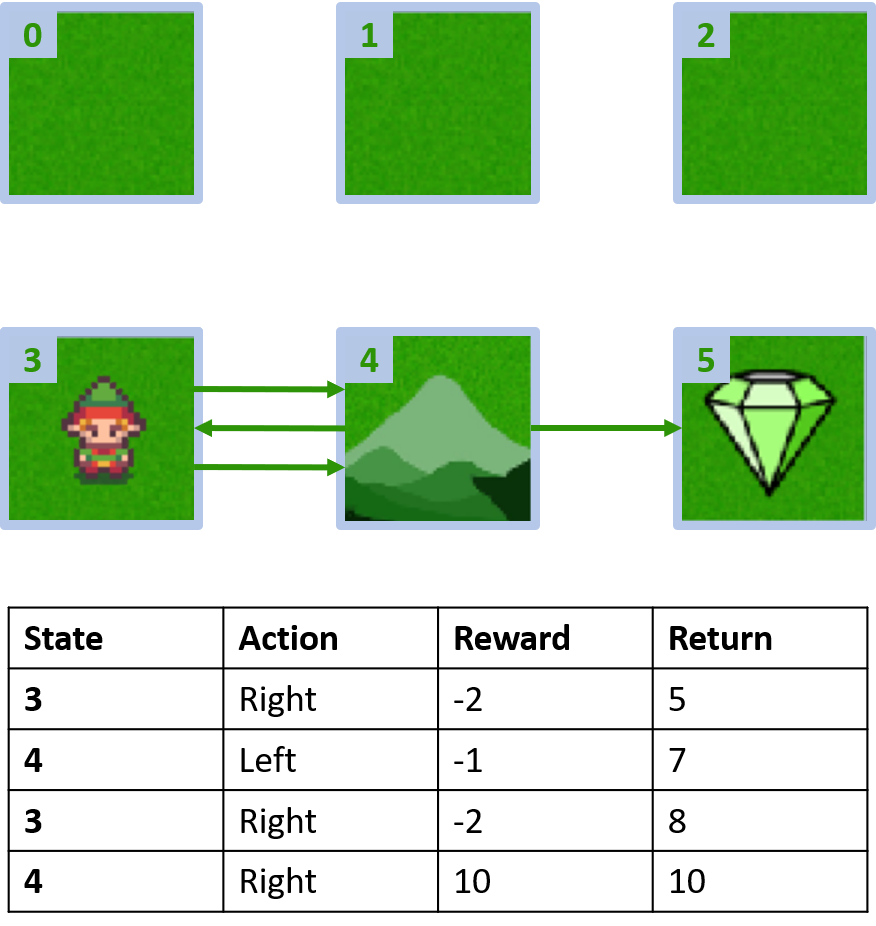
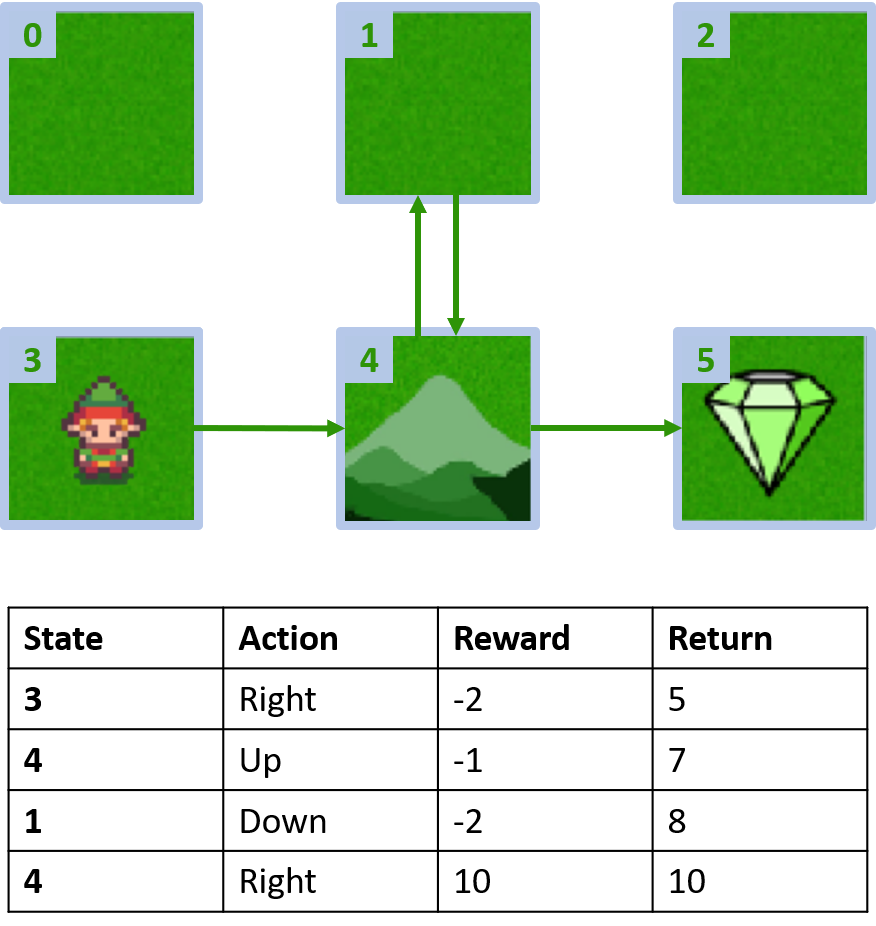
Grid world personnalisé

Collecte de deux épisodes
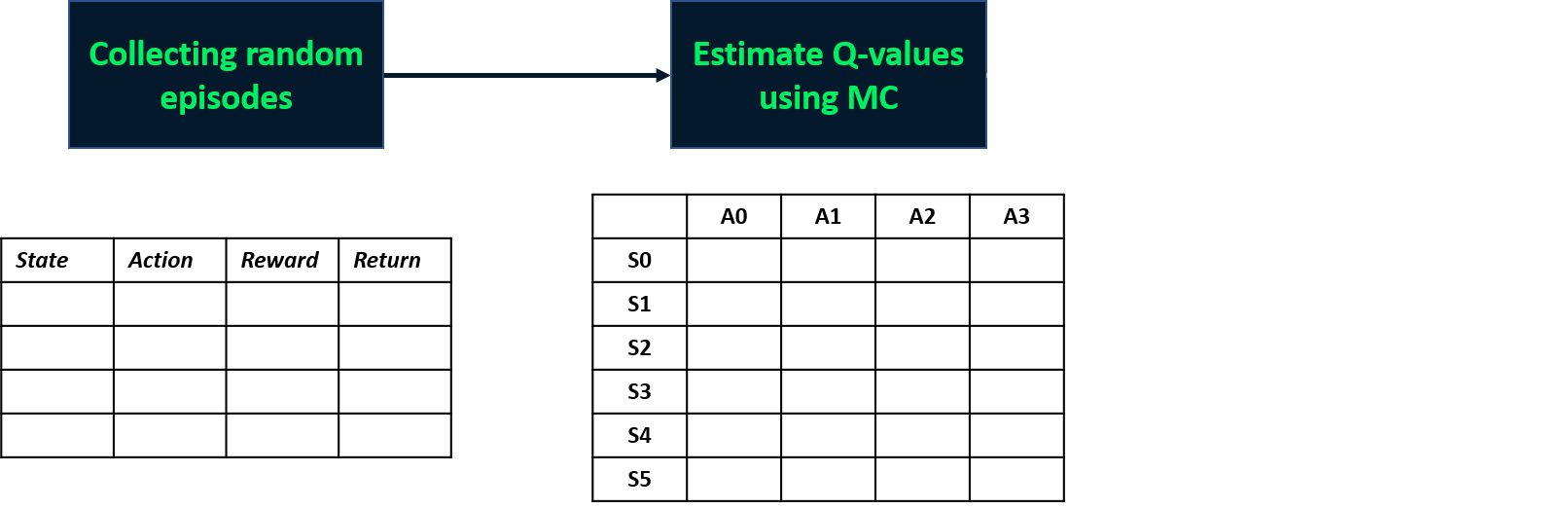
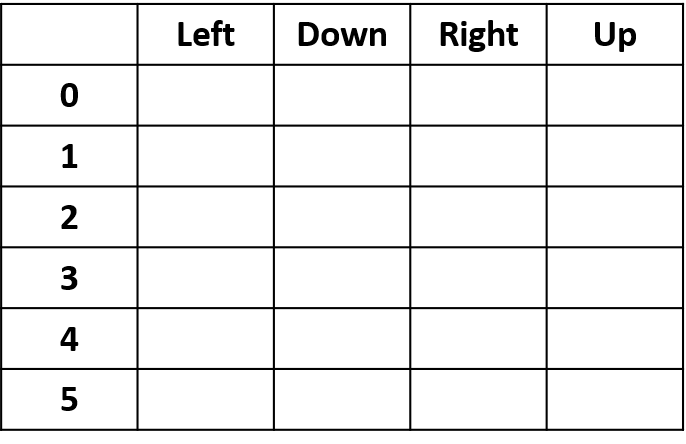
Estimation des Q-valeurs
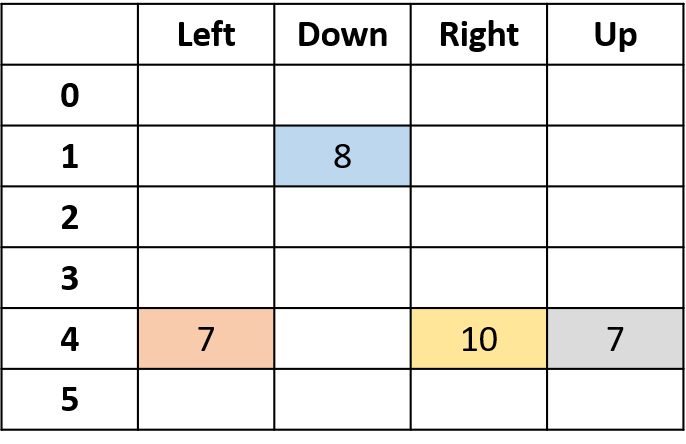
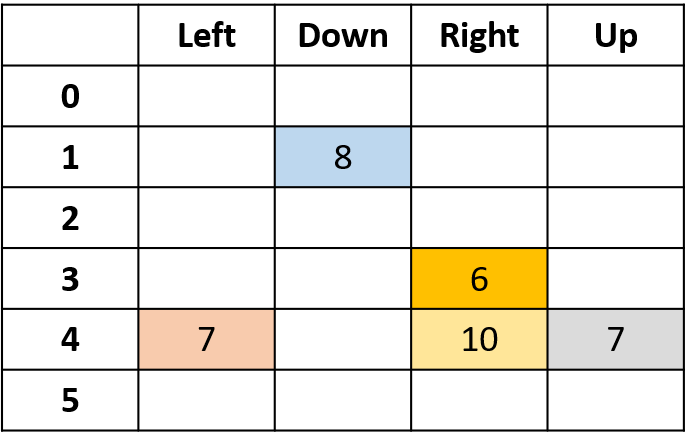
- Q-table : table des Q-valeurs
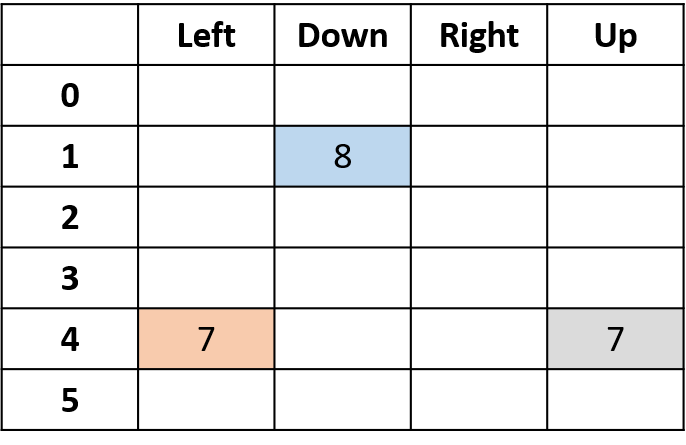
Q(4, gauche), Q(4, haut) et Q(1, bas)
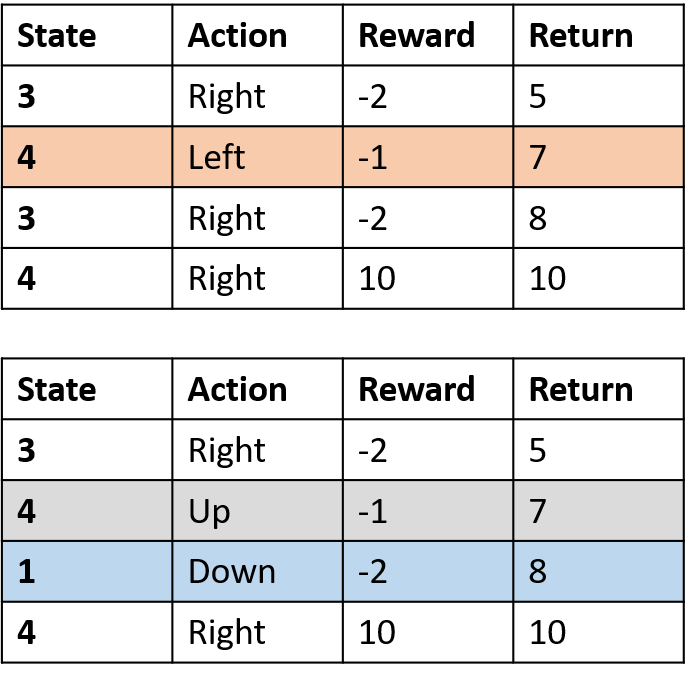
- (s,a) apparaît une fois -> remplir avec le retour
Q(4, droite)
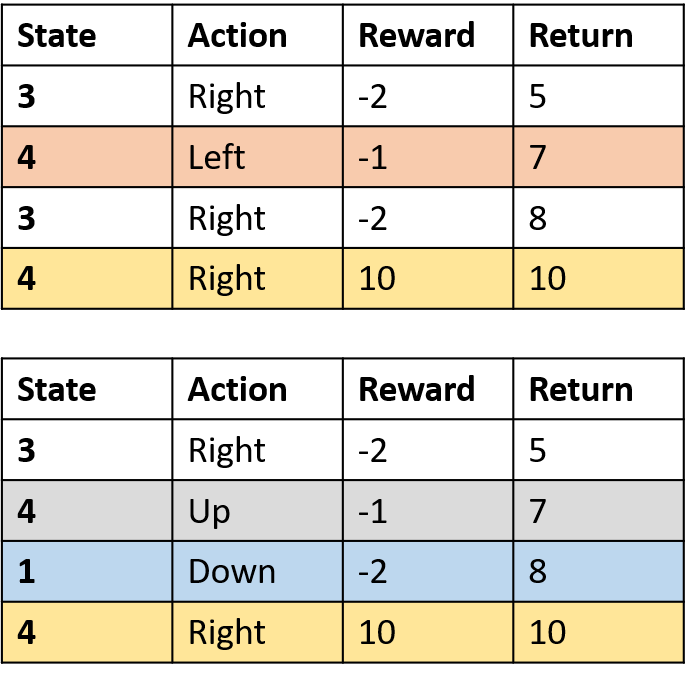
- (s,a) survient une fois par épisode -> moyenne
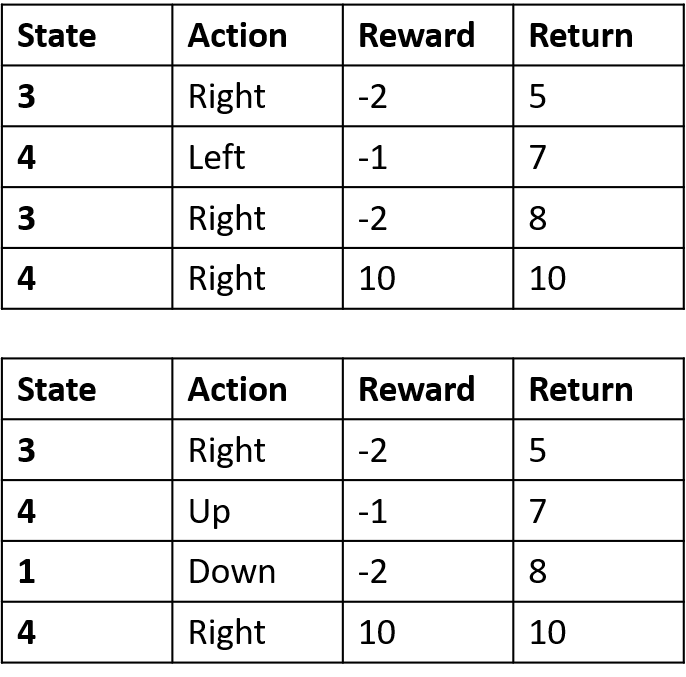
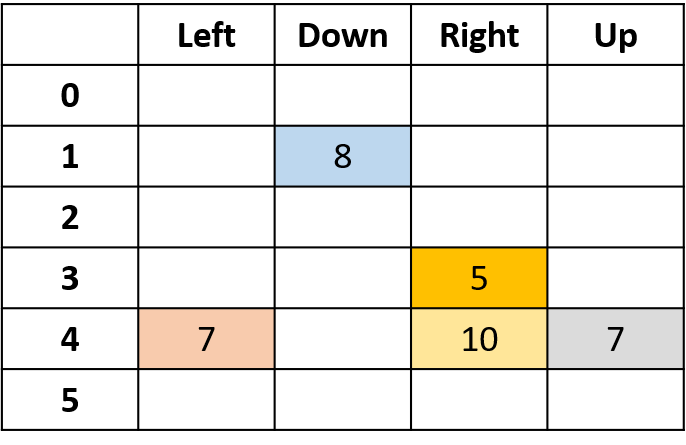
Q(3, droite) - Monte Carlo première visite
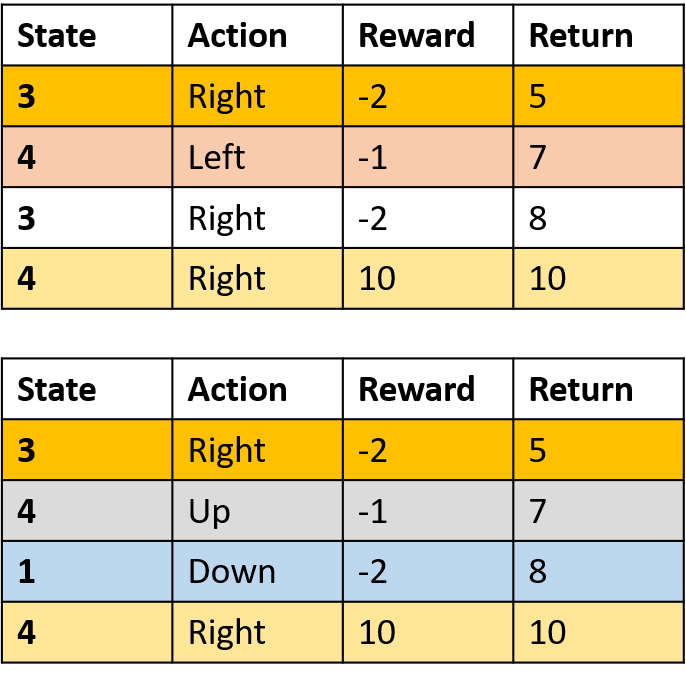
- Moyenne de la première visite de (s,a) dans les épisodes
Q(3, droite) - Monte Carlo toutes visites
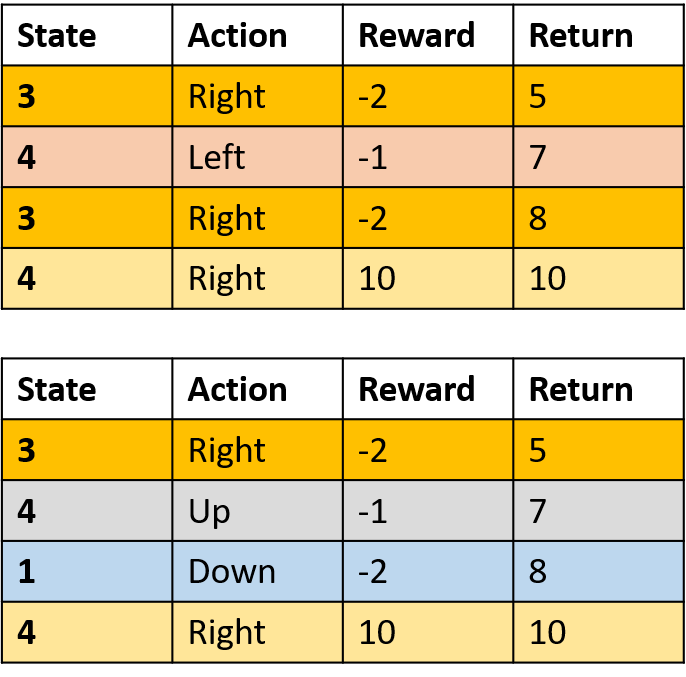
- Moyenne de chaque visite de (s,a) dans les épisodes
Récapitulatif