Q-learning
Reinforcement Learning avec Gymnasium en Python

Fouad Trad
Machine Learning Engineer
Introduction au Q-learning
Q-learning vs SARSA
SARSA

- Met à jour selon l’action effectuée
- Apprentissage on-policy
Q-learning

- Met à jour indépendamment des actions effectuées
- Apprentissage off-policy
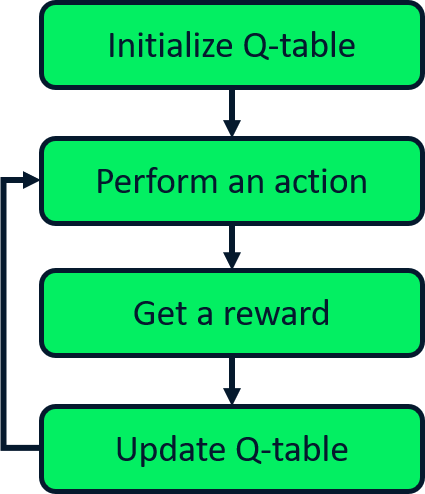
Mise à jour du Q-learning
def update_q_table(state, action, reward, new_state):old_value = Q[state, action]next_max = max(Q[new_state])Q[state, action] = (1 - alpha) * old_value + alpha * (reward + gamma * next_max)
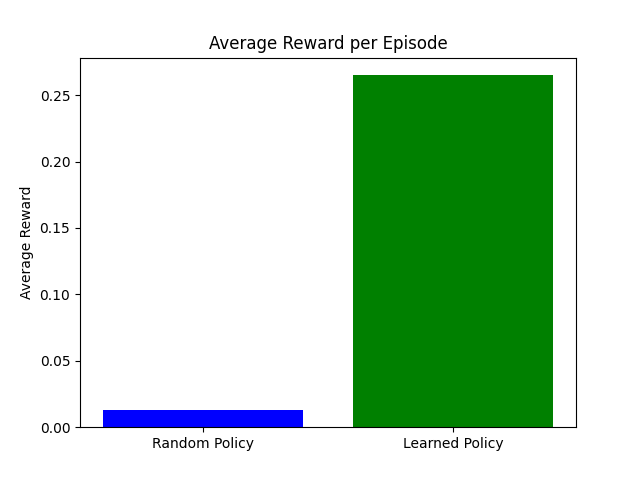
Évaluer le Q-learning