SARSA esperado
Reinforcement Learning con Gymnasium en Python

Fouad Trad
Machine Learning Engineer
SARSA esperado
Actualización SARSA esperado
SARSA

Q-learning

SARSA esperado

Valor esperado del siguiente estado
- Tiene en cuenta todas las acciones

- Acciones aleatorias → probabilidades iguales

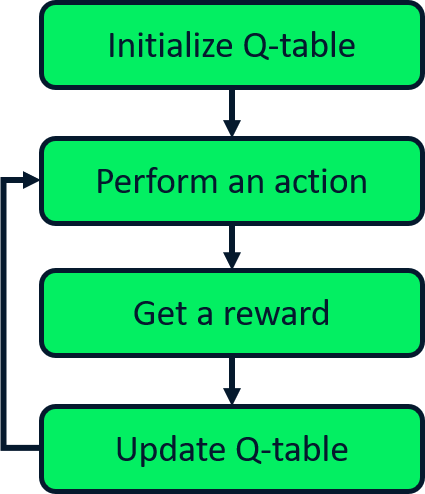
Implementación con Frozen Lake
Regla de actualización de SARSA esperado
def update_q_table(state, action, next_state, reward):expected_q = np.mean(Q[next_state])Q[state, action] = (1-alpha) * Q[state, action] + alpha * (reward + gamma * expected_q)
Política del agente


