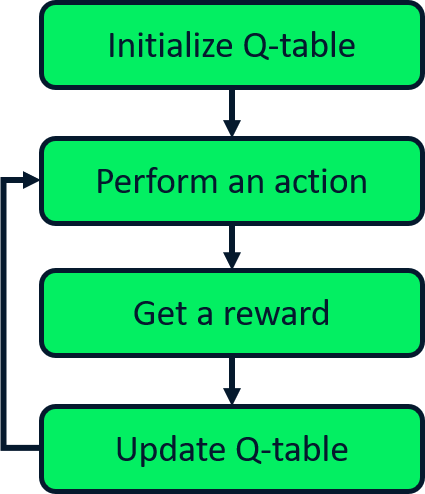
Q-learning
Reinforcement Learning com Gymnasium em Python

Fouad Trad
Machine Learning Engineer
Introdução ao Q-learning
Q-learning vs. SARSA
SARSA

- Atualiza com base na ação tomada
- Aprendiz on-policy
Q-learning

- Atualiza independente das ações tomadas
- Aprendiz off-policy
Atualização do Q-learning
def update_q_table(state, action, reward, new_state):old_value = Q[state, action]next_max = max(Q[new_state])Q[state, action] = (1 - alpha) * old_value + alpha * (reward + gamma * next_max)
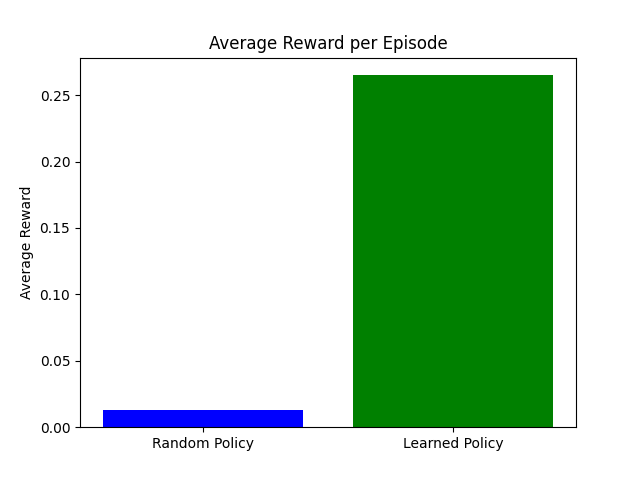
Avaliação do Q-learning