Evreşimsel Sinir Ağları
PyTorch ile Orta Düzey Deep Learning

Michal Oleszak
Machine Learning Engineer
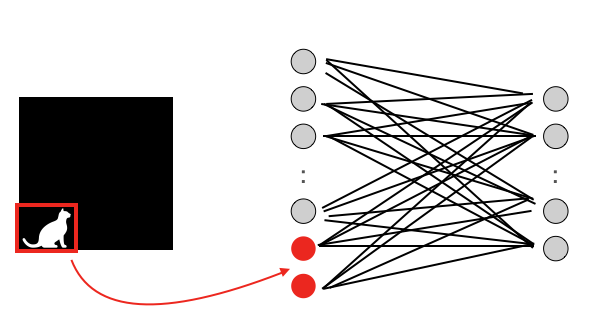
Neden doğrusal katmanlar değil?
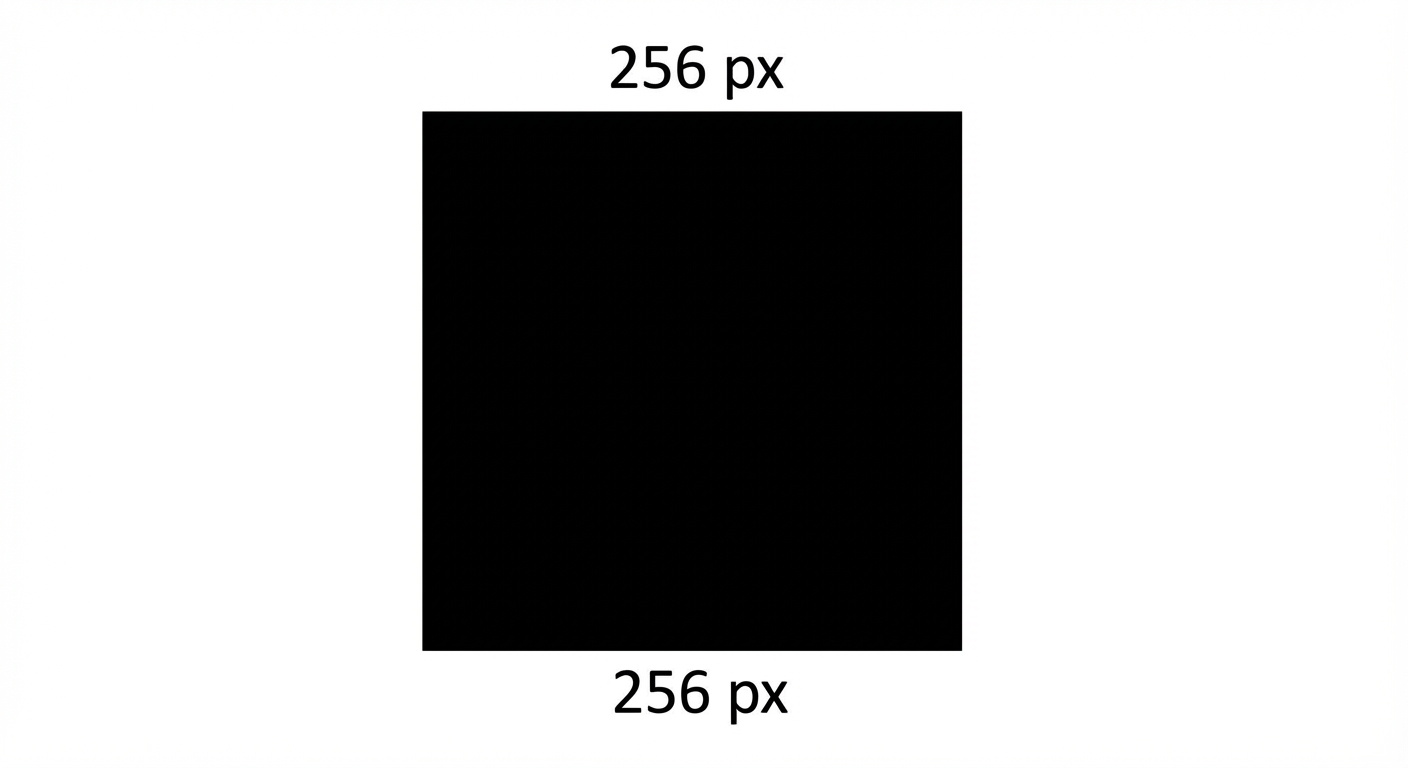
Neden doğrusal katmanlar değil?
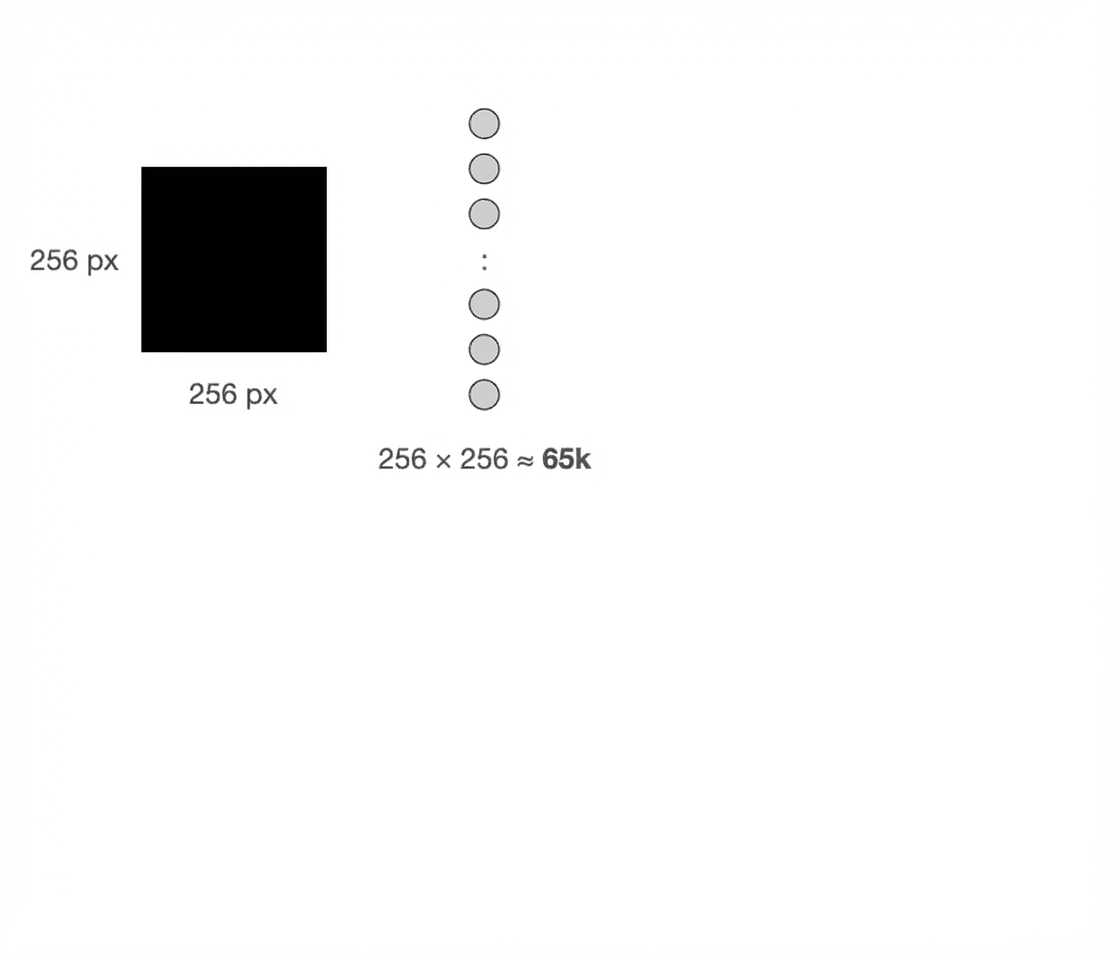
Neden doğrusal katmanlar değil?
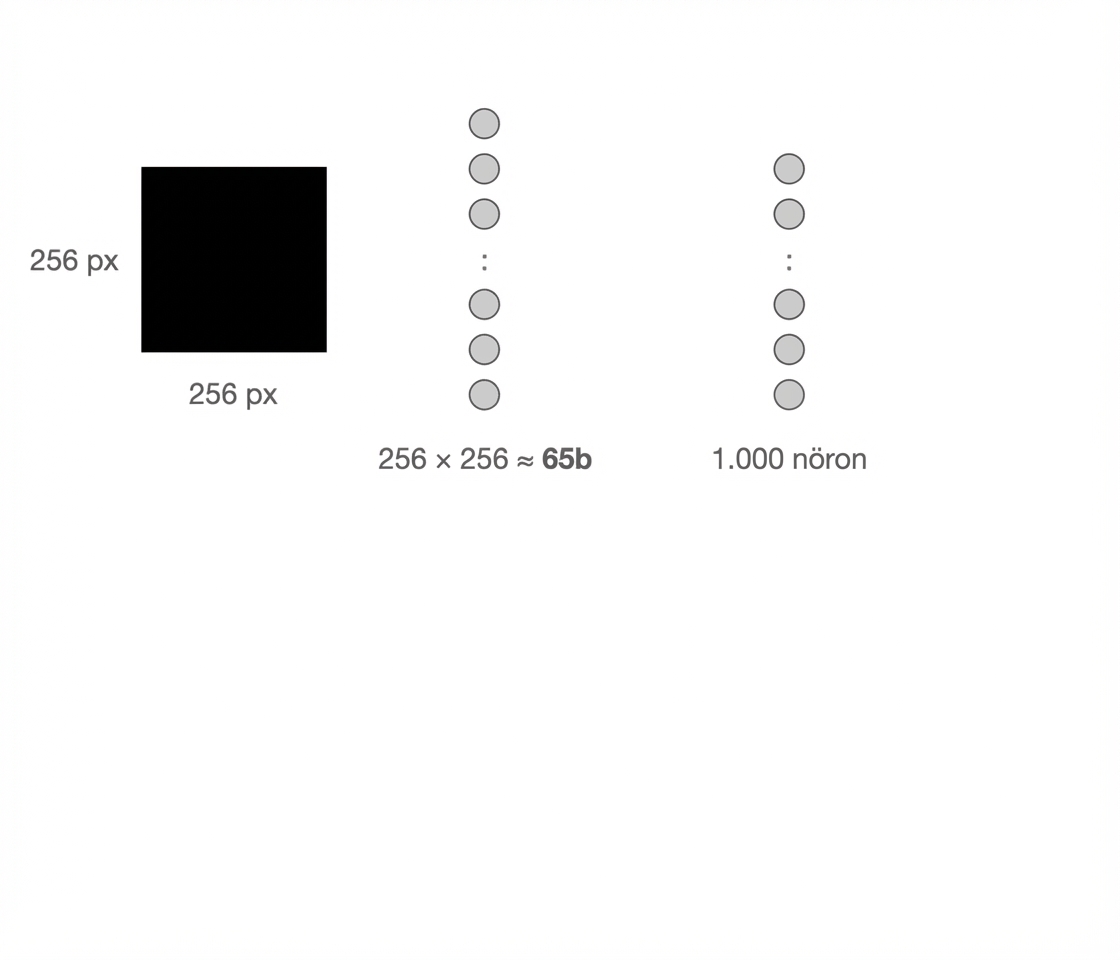
Neden doğrusal katmanlar değil?
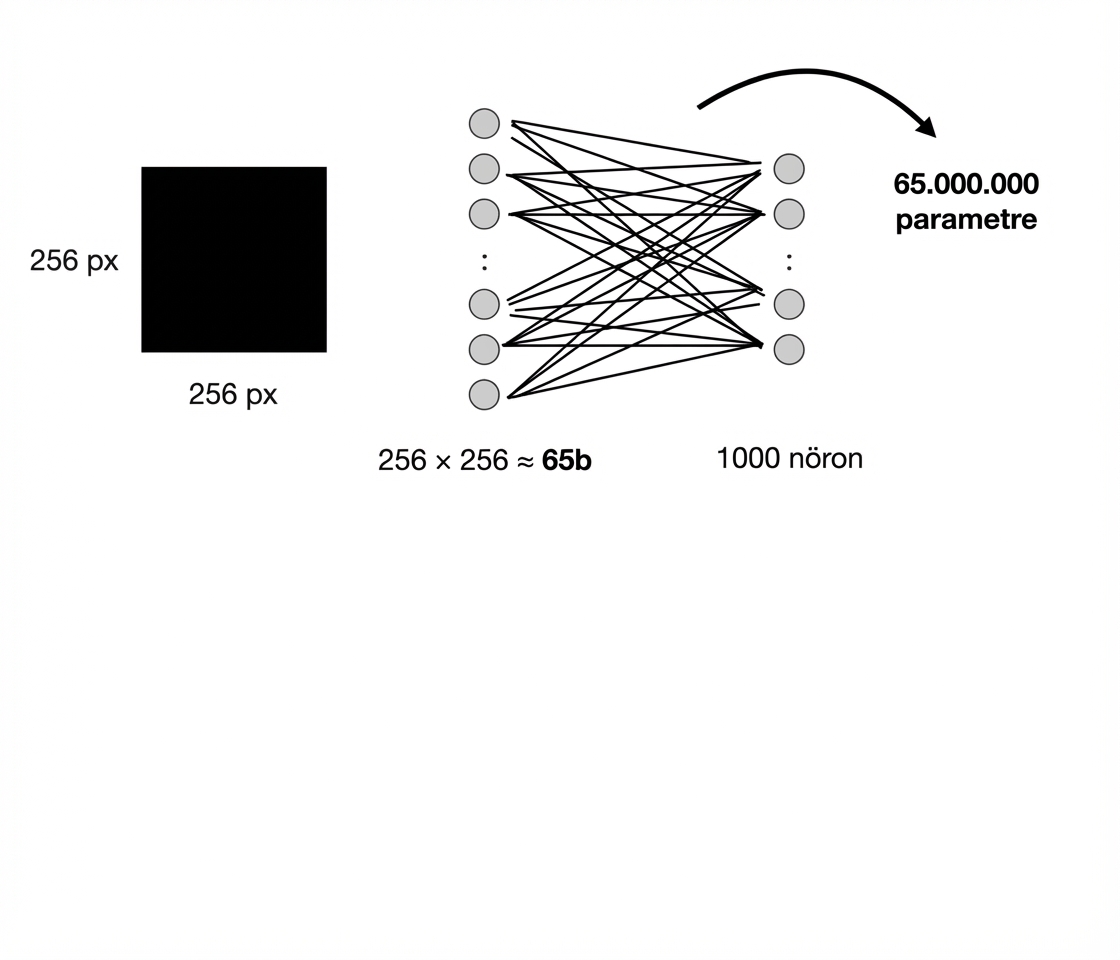
Neden doğrusal katmanlar değil?
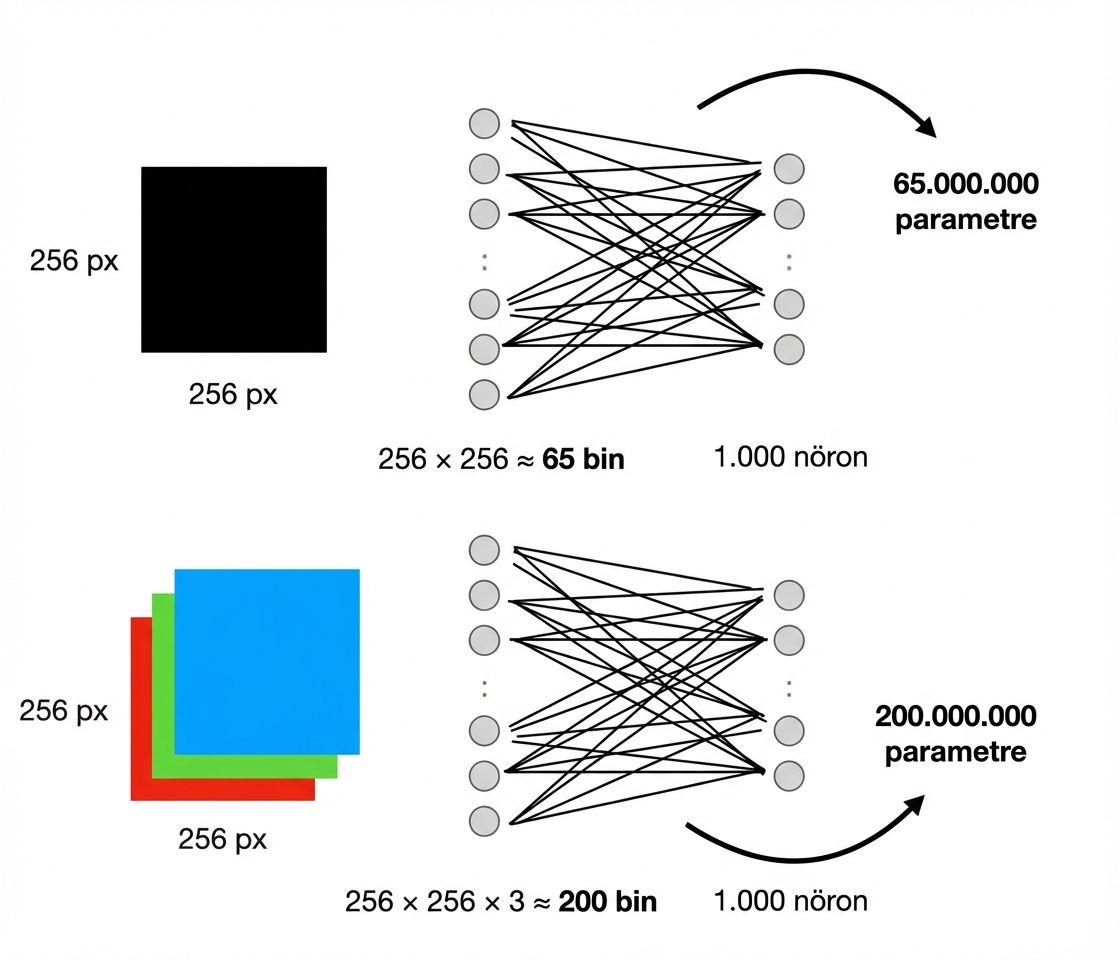
Neden doğrusal katmanlar değil?
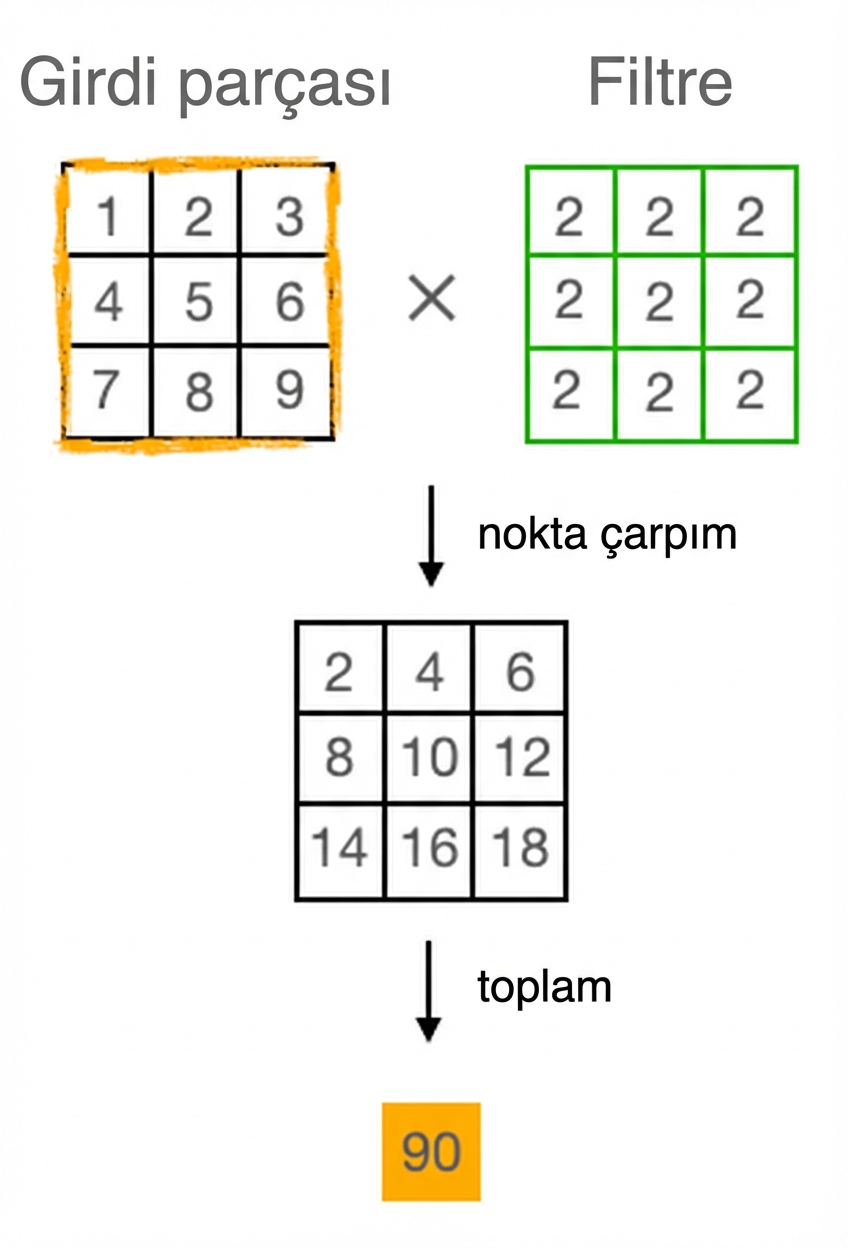
Evreşim katmanı

Evreşim
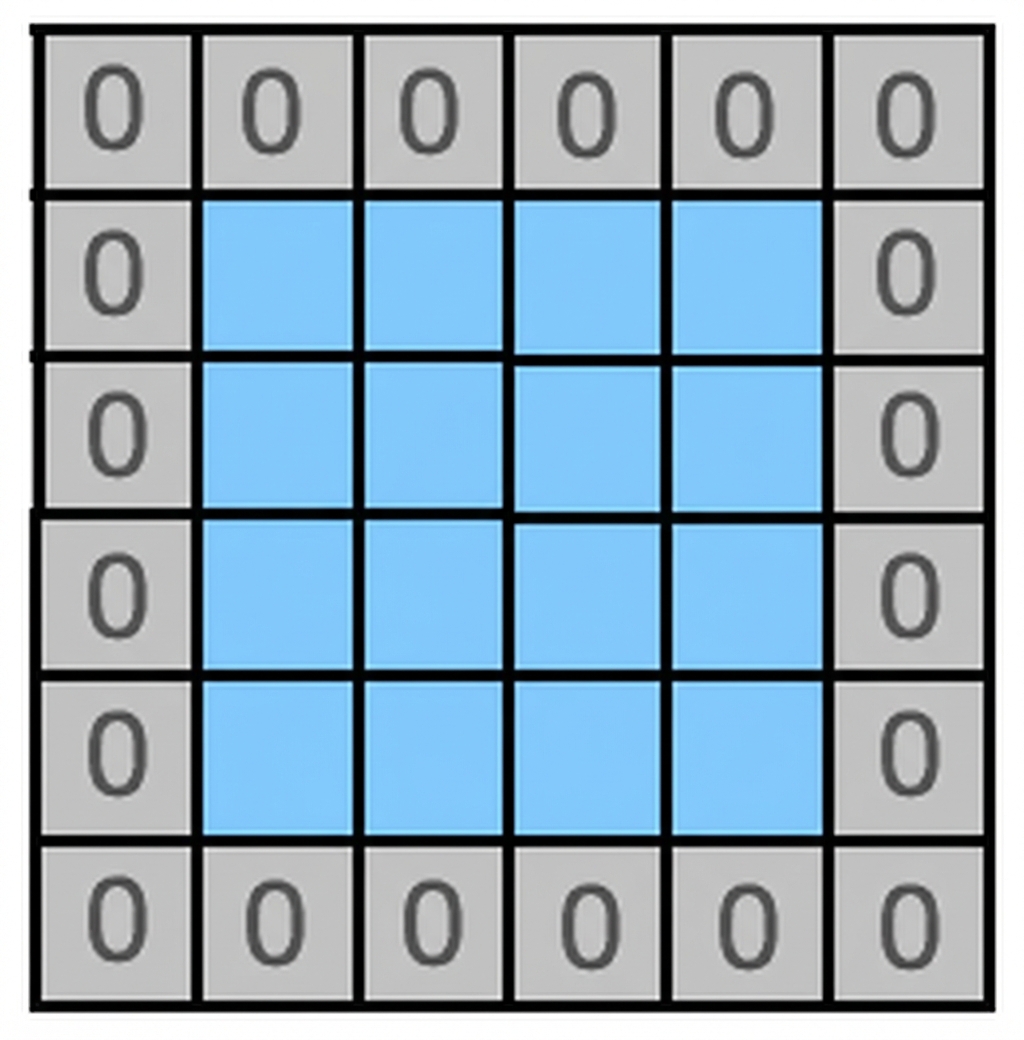
Sıfır dolgusu (zero-padding)
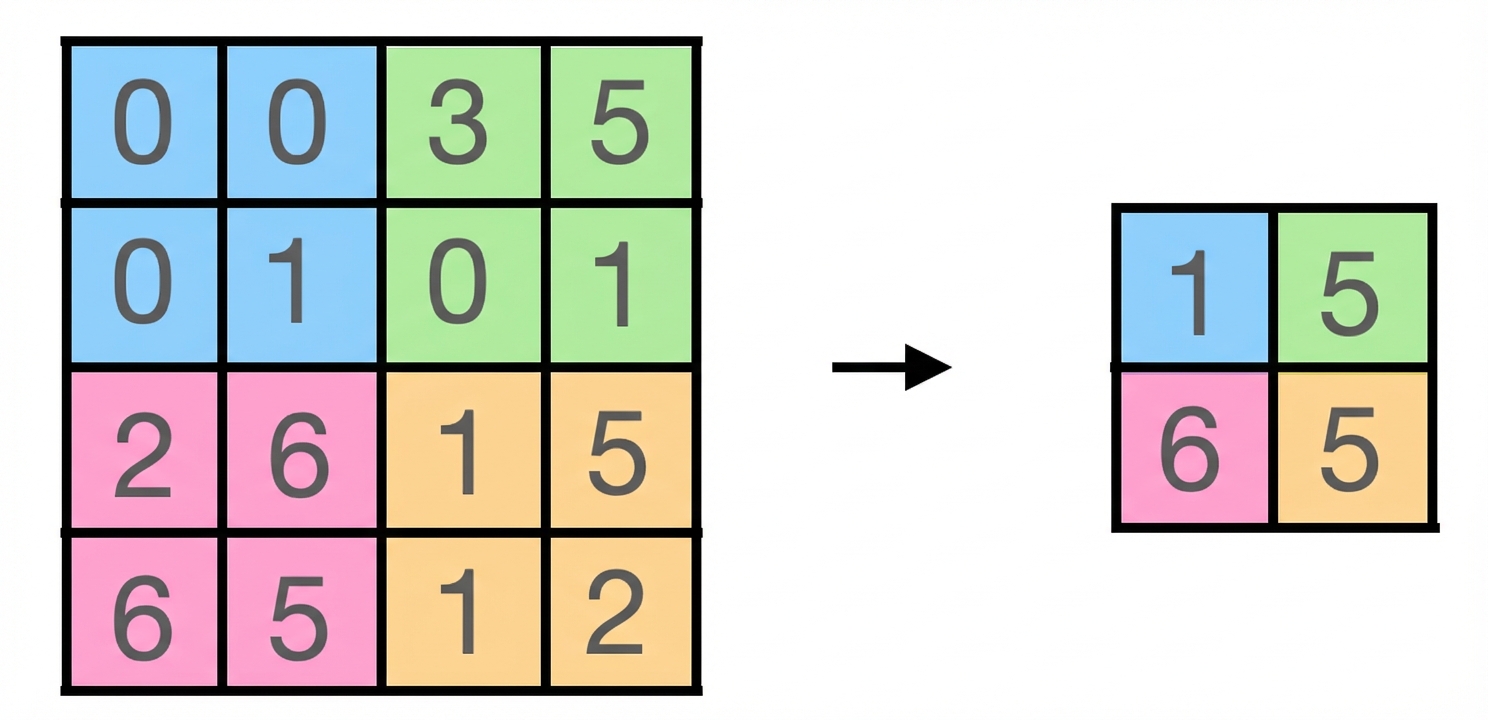
Maksimum havuzlama (Max Pooling)
Özellik çıkarıcı çıktı boyutu

Özellik çıkarıcı çıktı boyutu

Özellik çıkarıcı çıktı boyutu

Özellik çıkarıcı çıktı boyutu

Özellik çıkarıcı çıktı boyutu


