Monte Carlo yöntemleri
Python ile Gymnasium'da Reinforcement Learning

Fouad Trad
Machine Learning Engineer
Tekrar: modele dayalı öğrenme
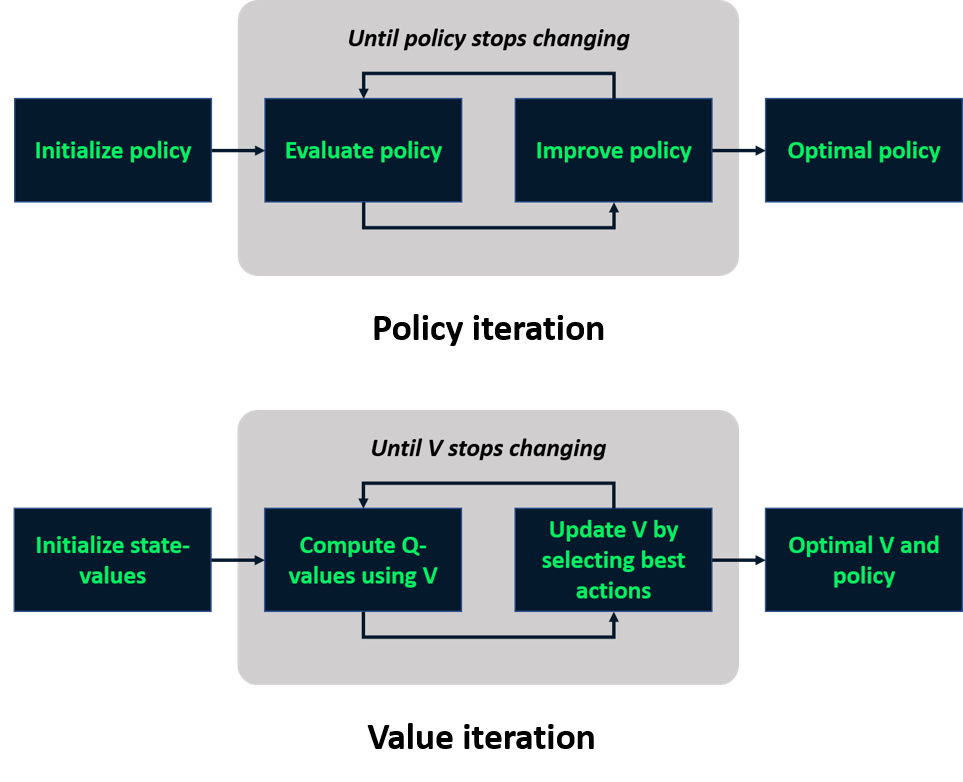
Modelden bağımsız öğrenme

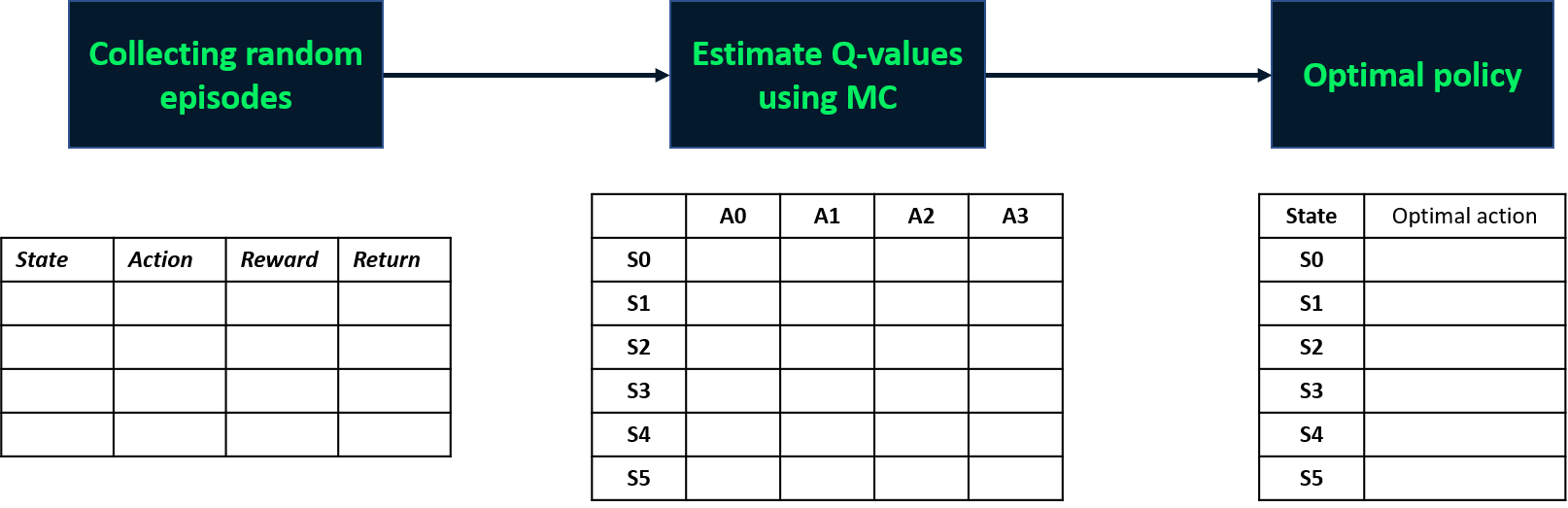
Monte Carlo yöntemleri
- Modelden bağımsız teknikler
- Q-değerlerini bölümlerden tahmin eder
Monte Carlo yöntemleri
- Modelden bağımsız teknikler
- Q-değerlerini bölümlerden tahmin eder
Monte Carlo yöntemleri
- Modelden bağımsız teknikler
- Q-değerlerini bölümlerden tahmin eder
- İki yöntem: ilk-ziyaret, her-ziyaret
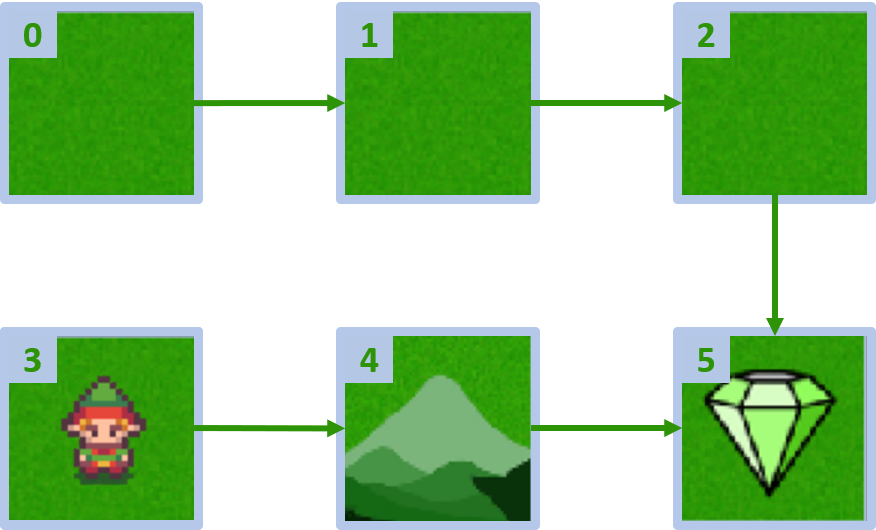
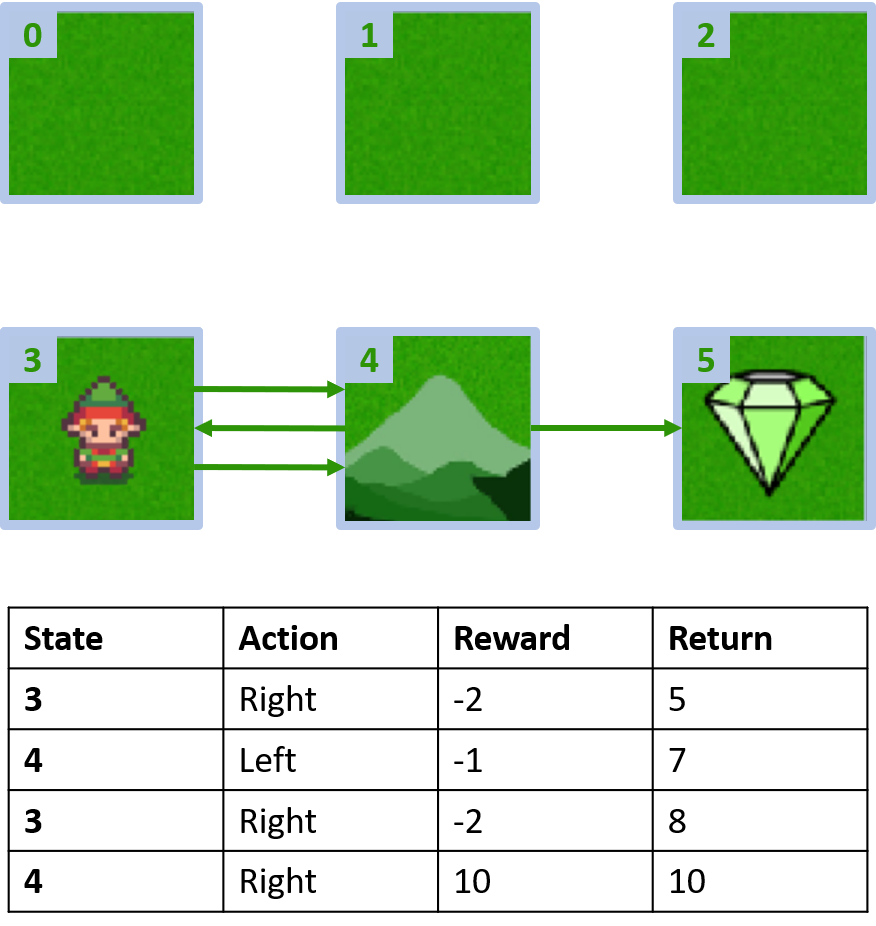
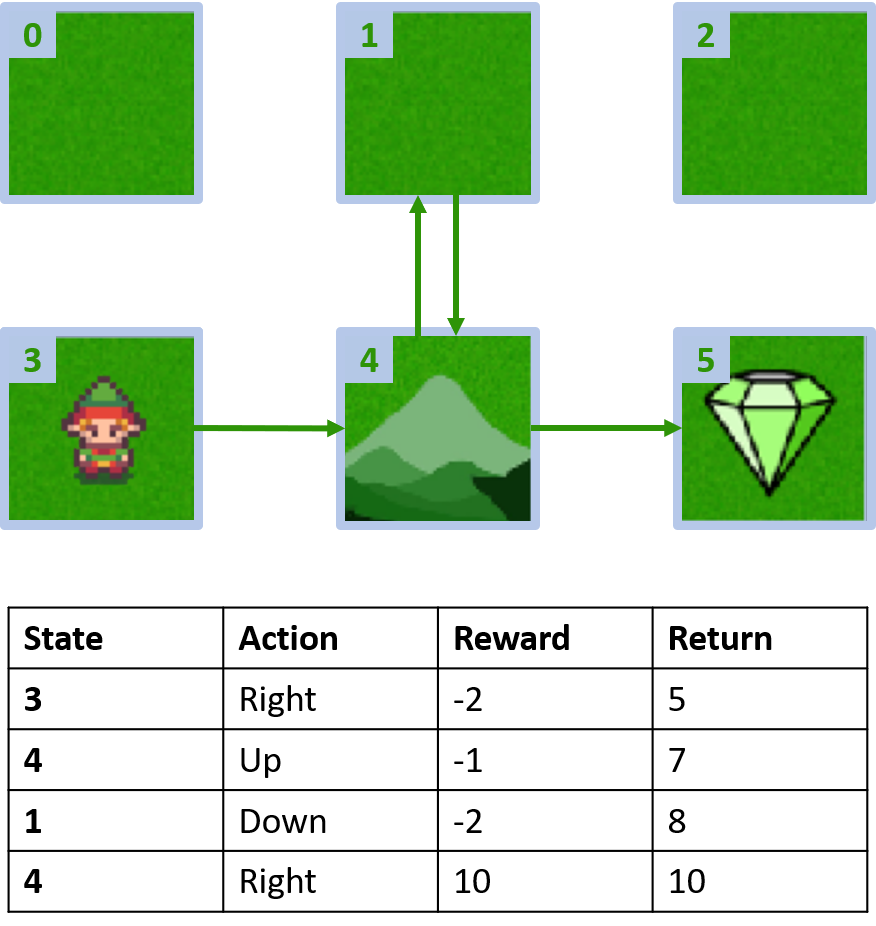
Özel ızgara dünya

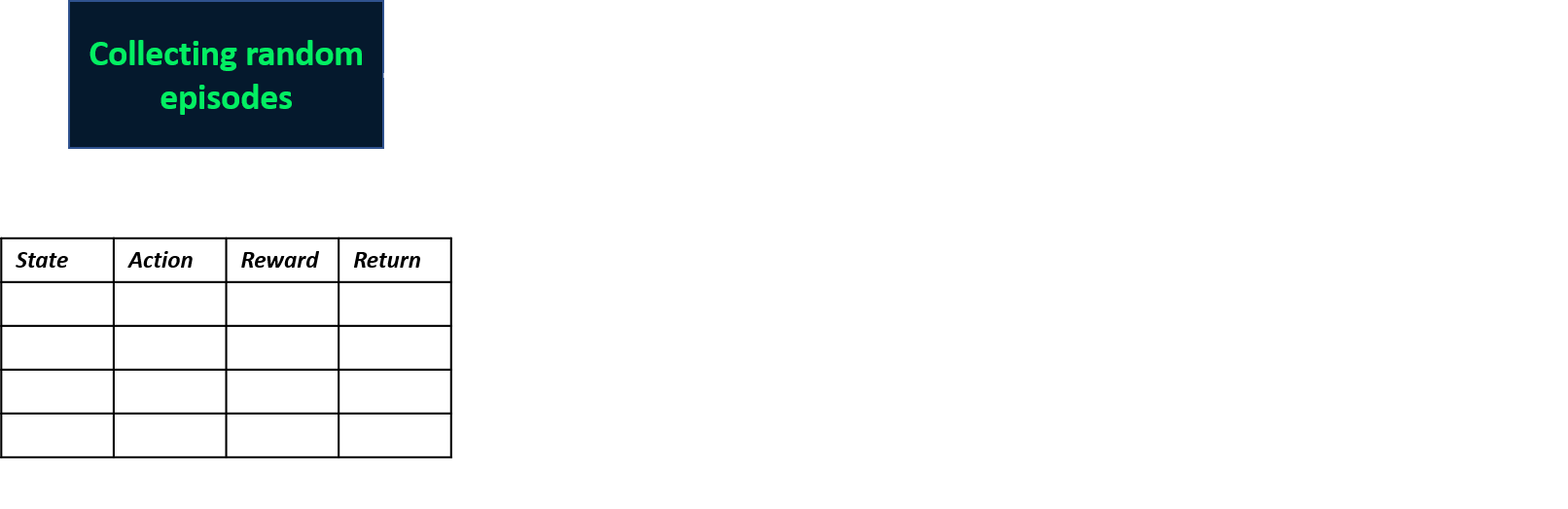
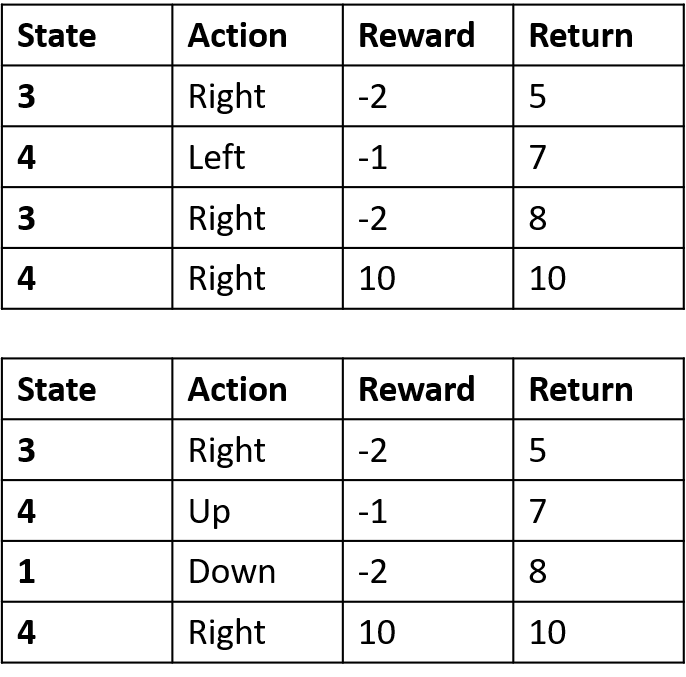
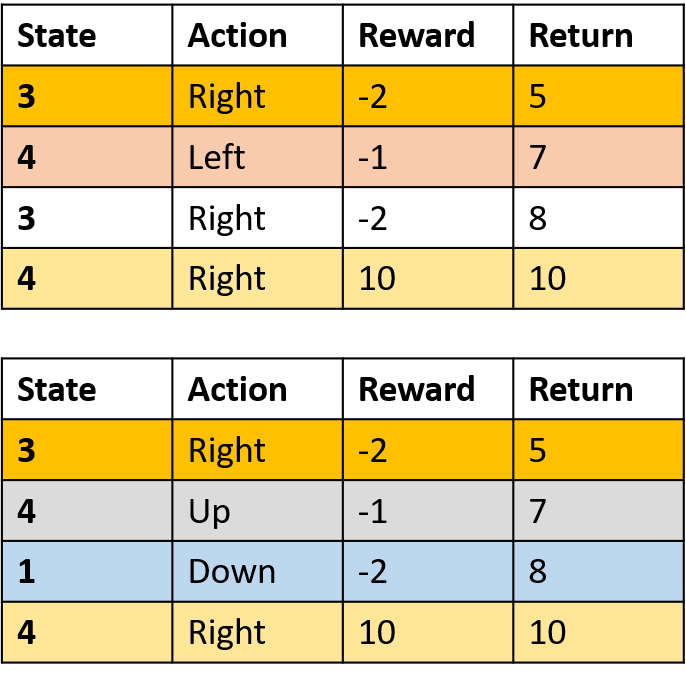
İki bölüm toplama
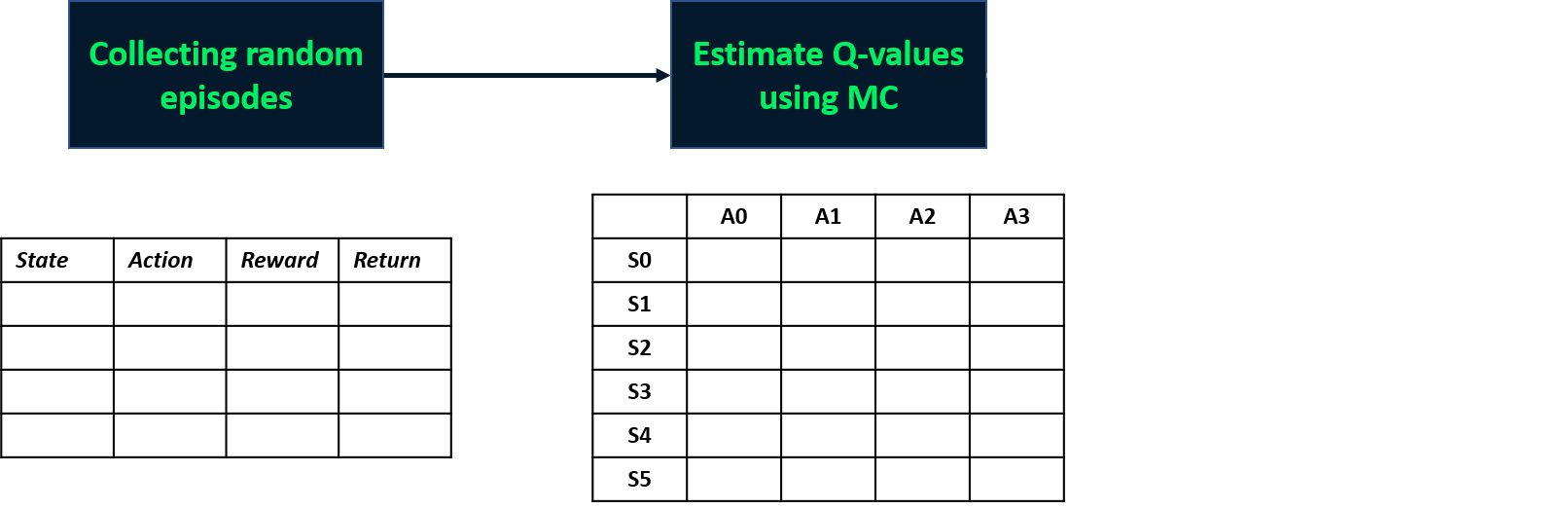
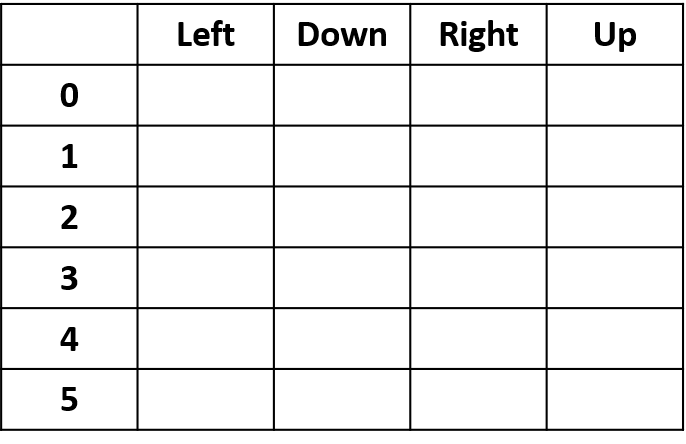
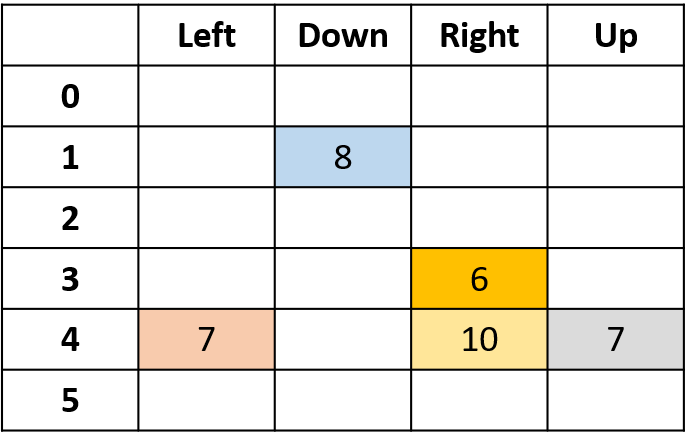
Q-değerlerini tahmin etme
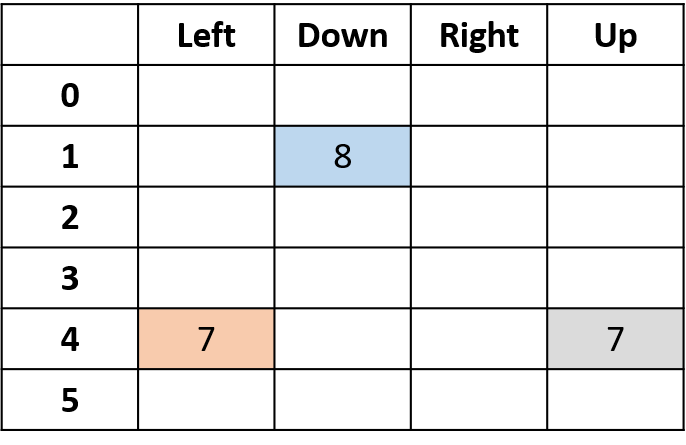
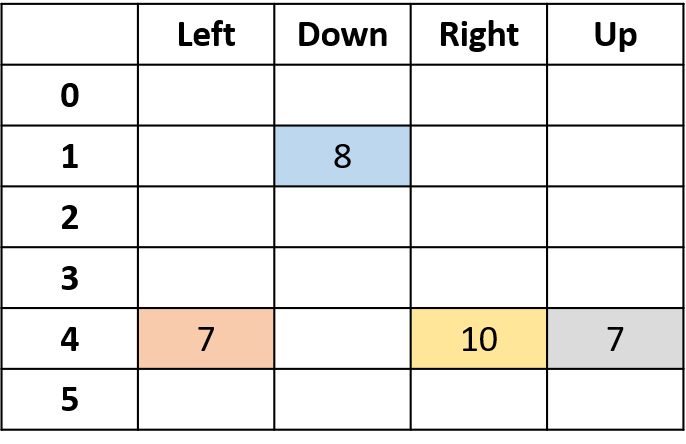
- Q-tablosu: Q-değerleri tablosu
Q(4, sol), Q(4, yukarı) ve Q(1, aşağı)
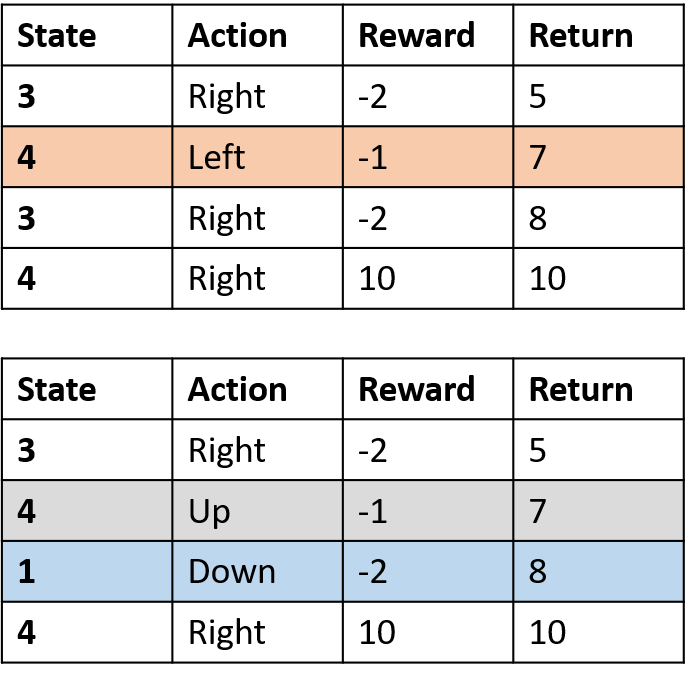
- (s,a) bir kez görünür -> getiriyle doldur
Q(4, sağ)
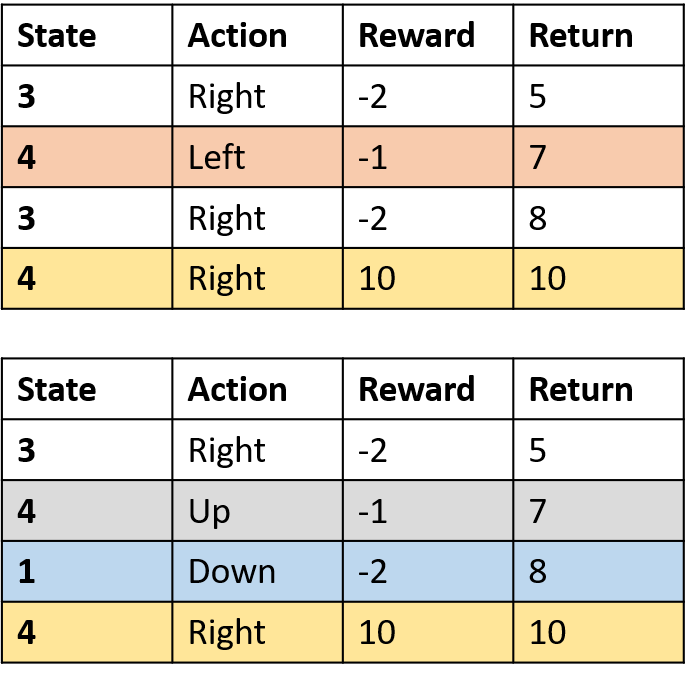
- (s,a) bölüm başına bir kez -> ortalama al
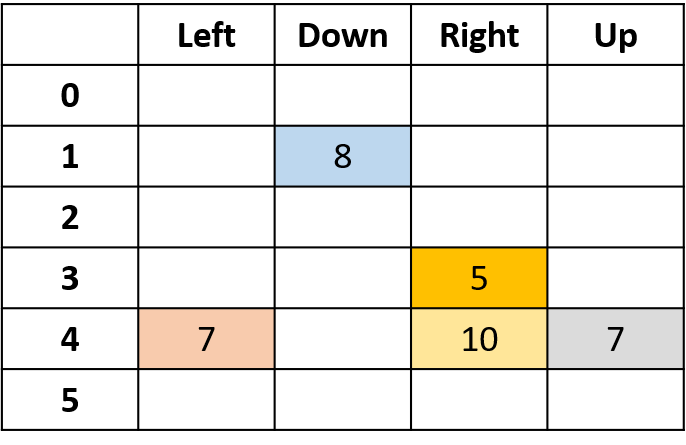
Q(3, sağ) - ilk-ziyaret Monte Carlo
- Bölüm içinde (s,a) için ilk ziyareti ortala
Q(3, sağ) - her-ziyaret Monte Carlo
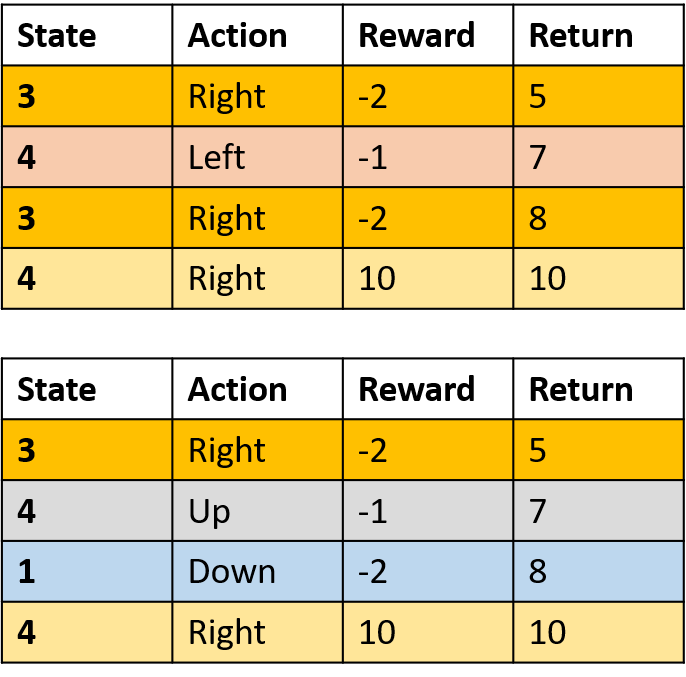
- Bölüm içinde (s,a) için her ziyareti ortala
Hepsini birleştirme