Keşif ve sömürü dengesini kurma
Python ile Gymnasium'da Reinforcement Learning

Fouad Trad
Machine Learning Engineer
Rastgele eylemlerle eğitim

Keşif–sömürü ödünleşimi

Yemek seçimi

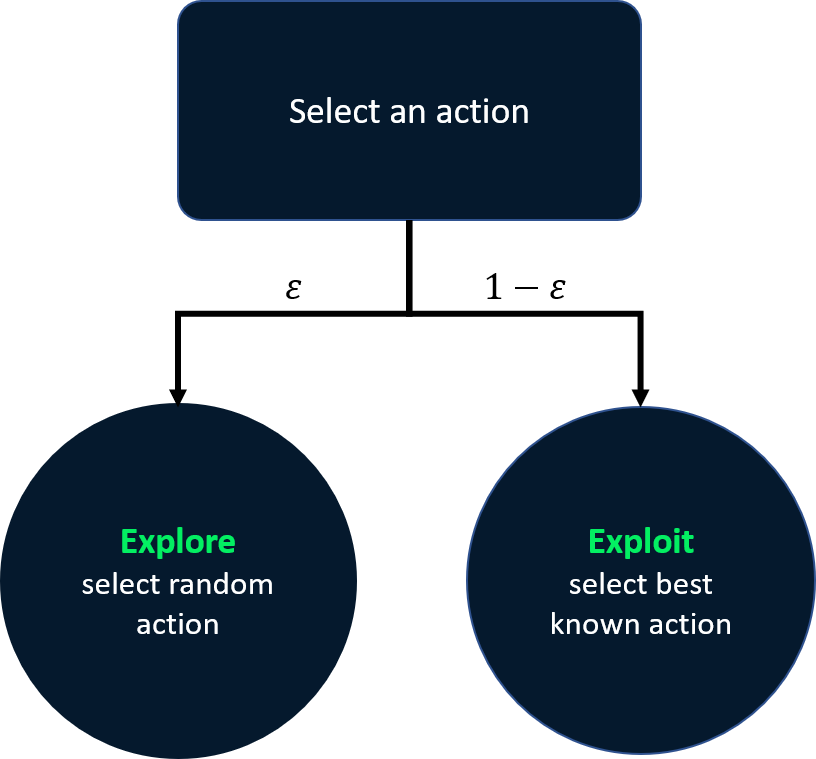
Epsilon-greedy stratejisi
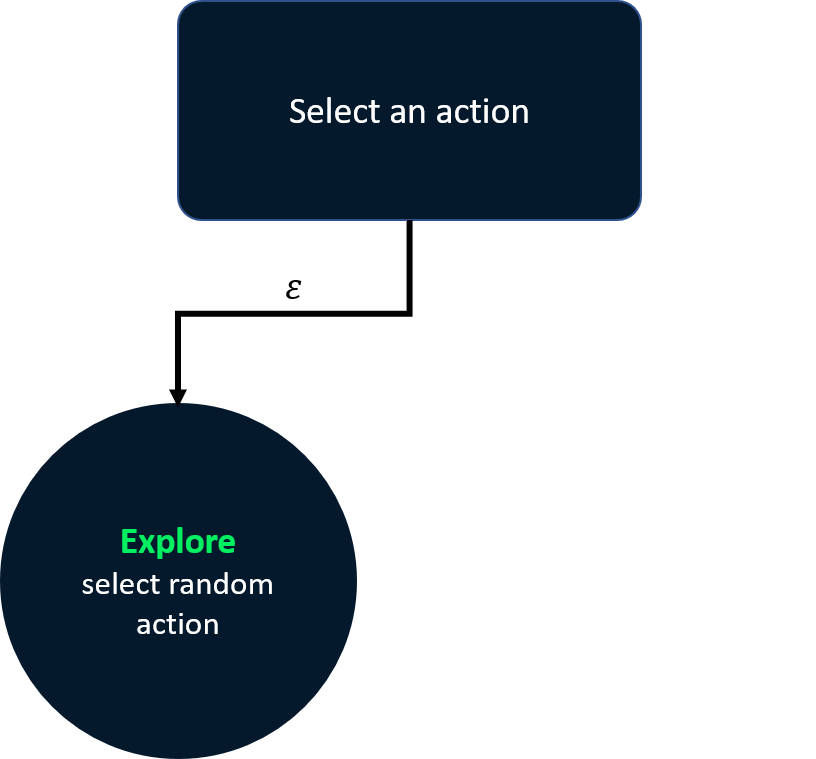
Epsilon-greedy stratejisi
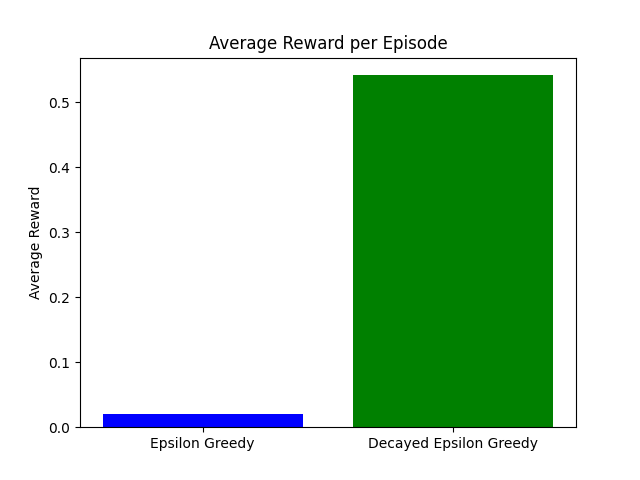
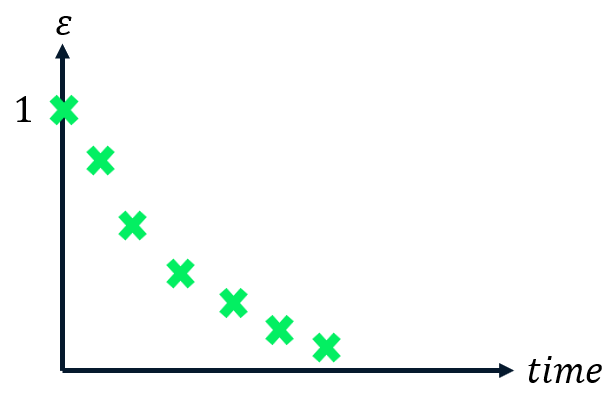
Azalan epsilon-greedy stratejisi
Frozen Lake ile uygulama

Stratejileri karşılaştırma