Gömme ve konumsal kodlama
PyTorch ile Transformer Modelleri

James Chapman
Curriculum Manager, DataCamp
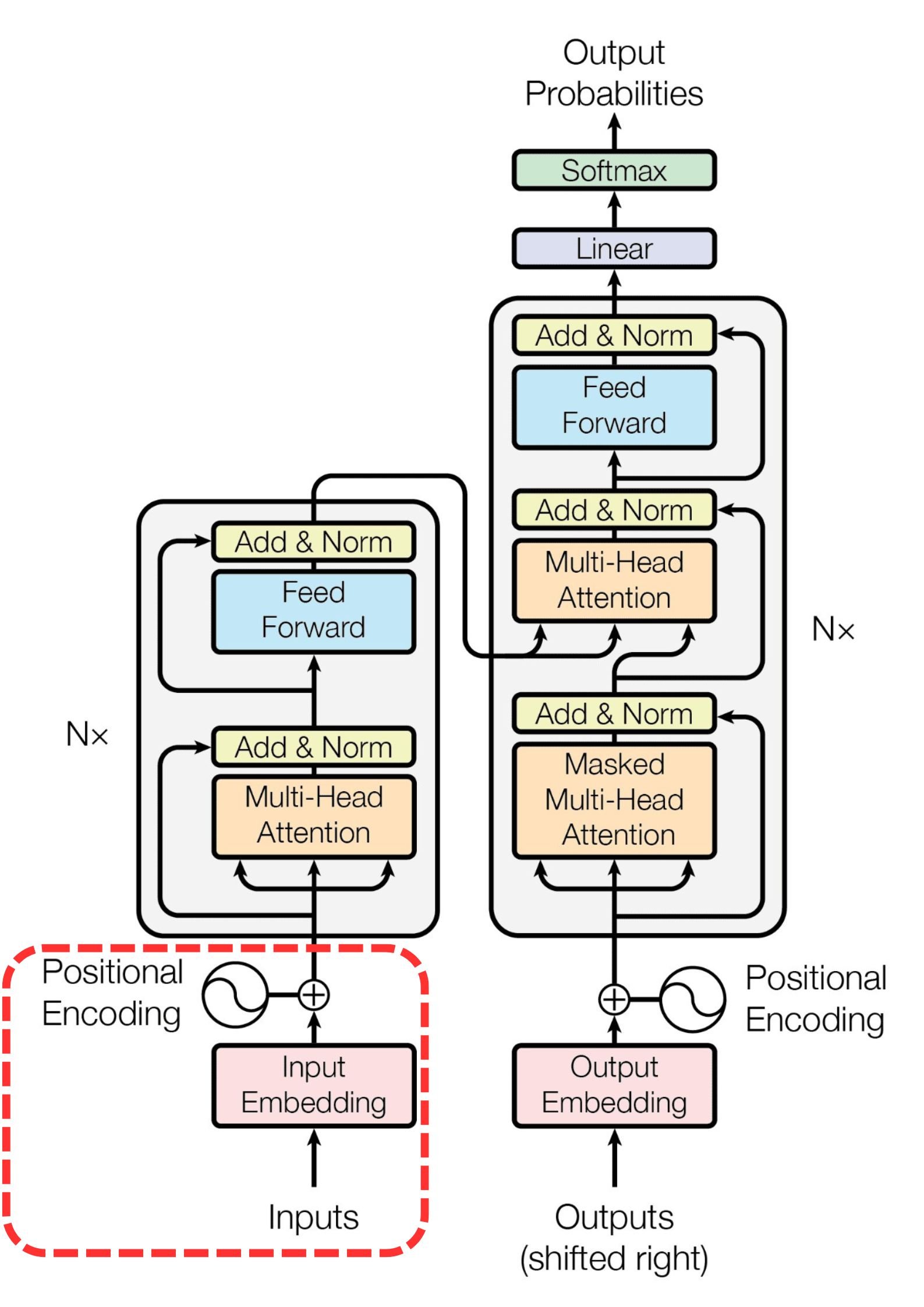
Dönüştürücülerde gömme ve konumsal kodlama
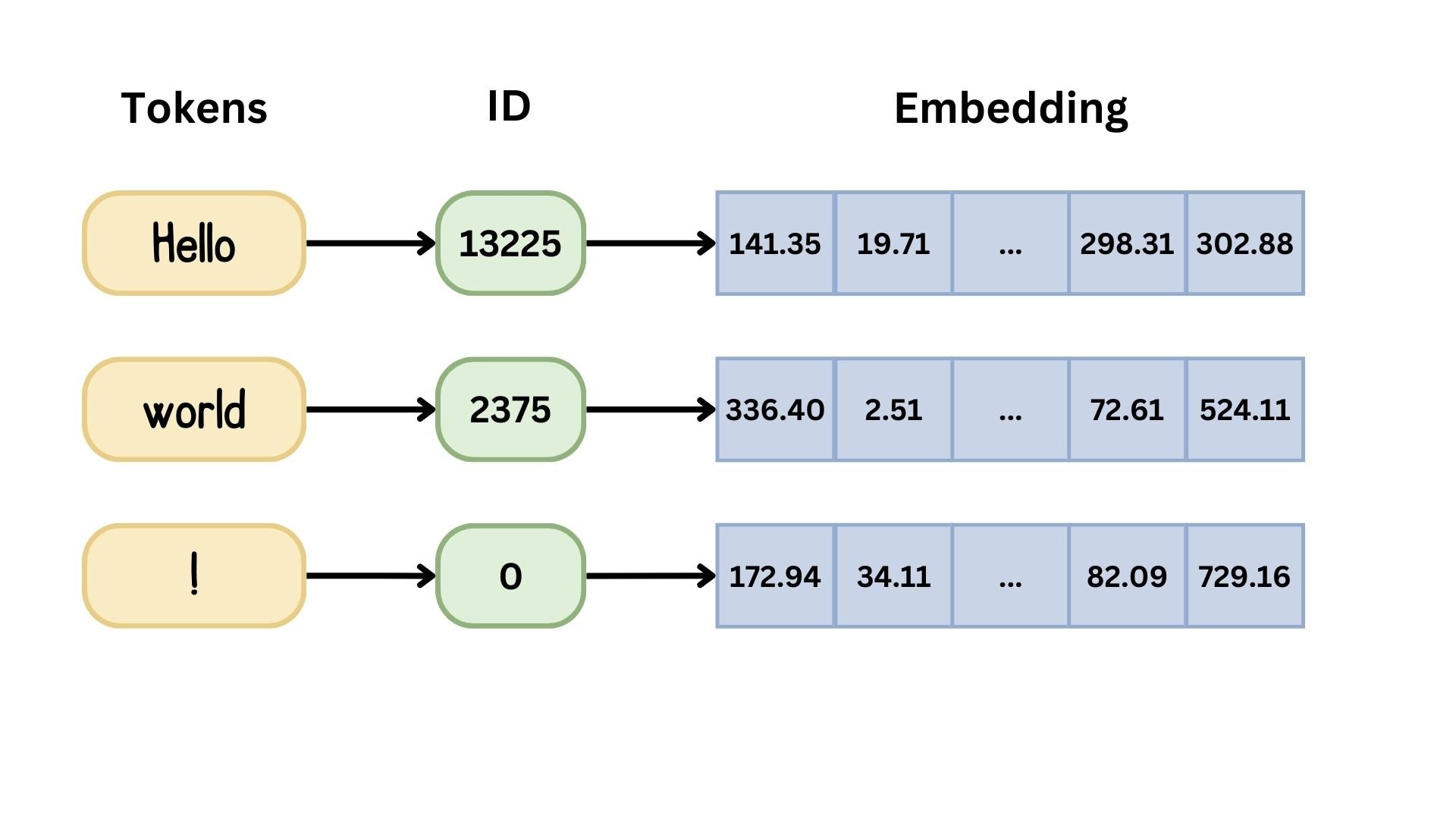
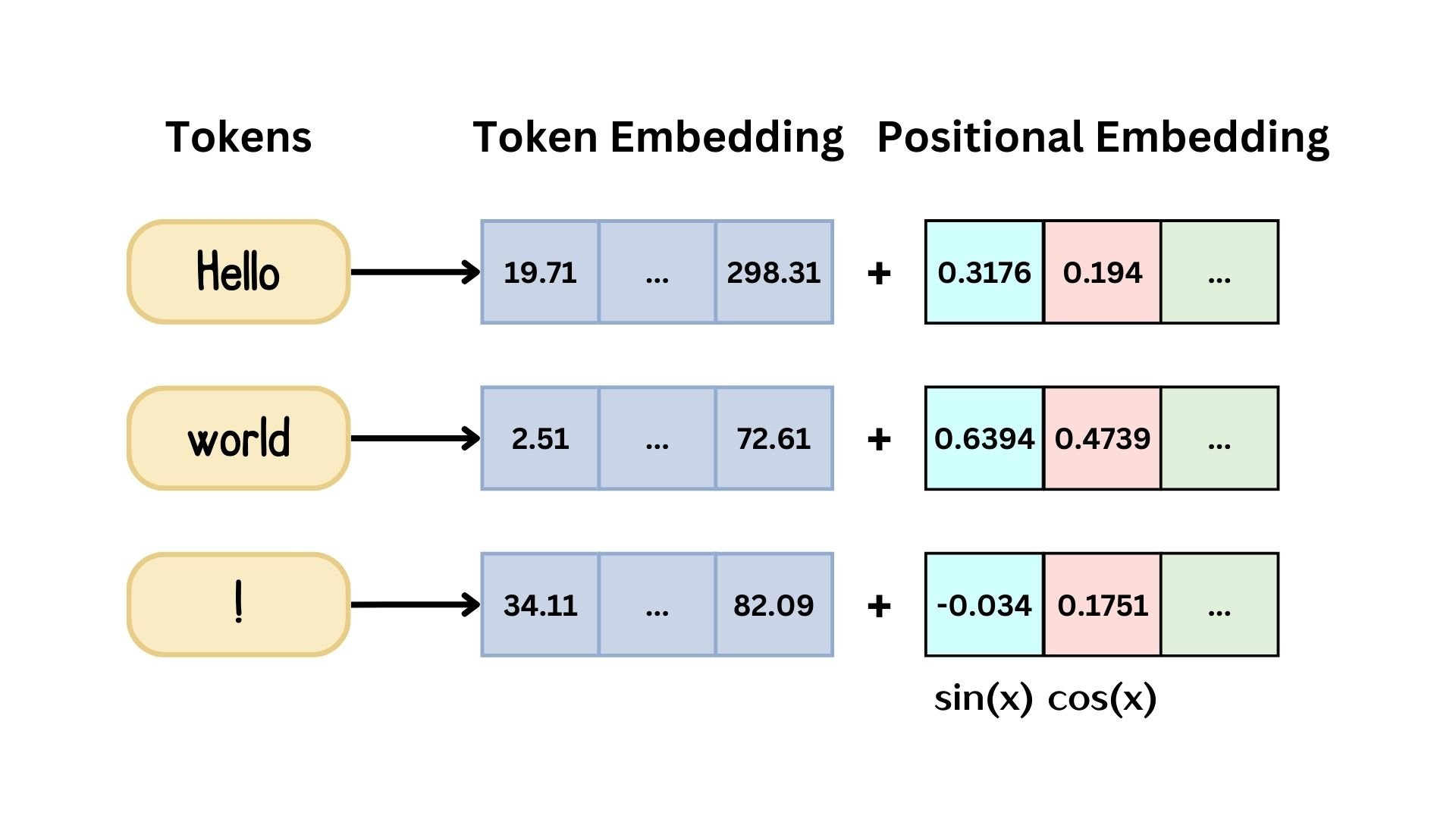
Dizileri gömme

Dizileri gömme
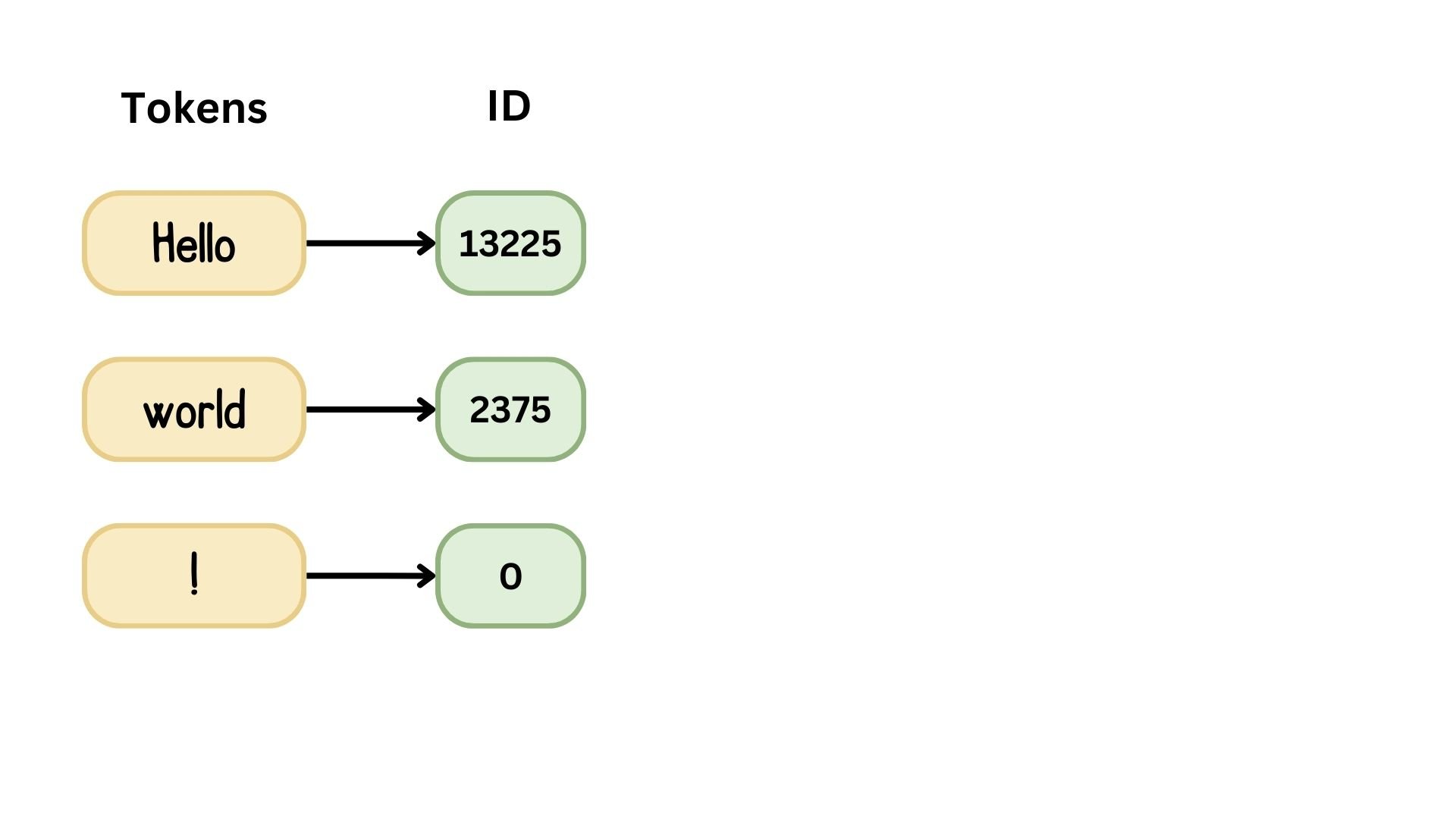
Dizileri gömme
Konumsal kodlama
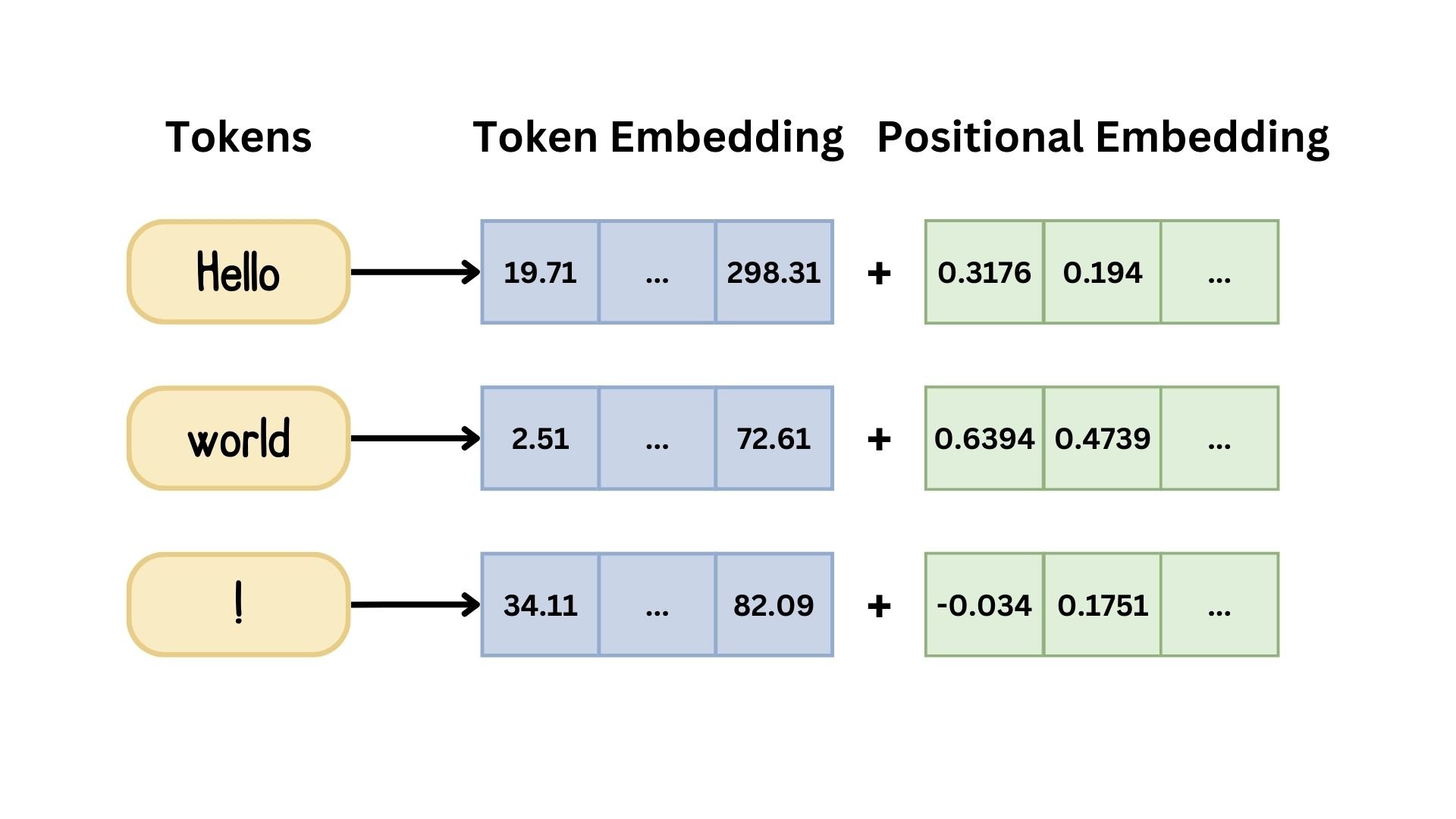
Konumsal kodlama
sin(x)
$$ PE_{(pos, 2i)}=\sin(\frac{pos}{10000^{2i/d_{model}}}) $$
cos(x)
$$ PE_{(pos, 2i+1)}=\cos(\frac{pos}{10000^{2i/d_{model}}}) $$

