U-Net ile anlamsal segmentasyon
PyTorch ile Görüntüler için Deep Learning

Michal Oleszak
Machine Learning Engineer
U-Net mimarisi

Encoder:
- Evrişim ve havuzlama katmanları
- Aşağı örnekleme: derinliği artırırken uzamsal boyutları küçültür
U-Net mimarisi
Decoder:
- Encoder'a simetriktir
- Özellik haritalarını transpoze evrişimlerle yukarı örnekler
U-Net mimarisi
Atlama bağlantıları:
- Encoder'dan decoder'a bağlantılar
- Aşağı örneklemede kaybolan detayları korur
Transpoze evrişim
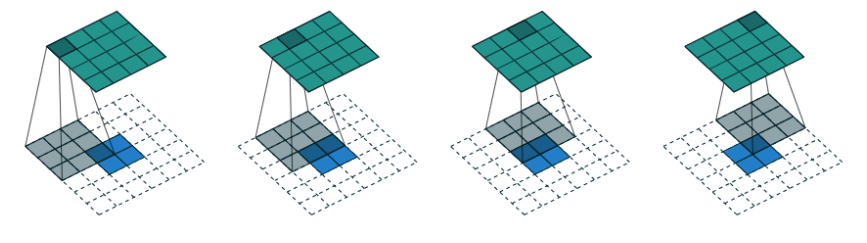
- Decoder'da özellik haritalarını yukarı örnekler: yükseklik ve genişliği artırırken derinliği azaltır
- Transpoze evrişim süreci:
- Girdi özellik haritası arasına/çevresine sıfırlar ekleyin
- Sıfır dolgulu girdi üzerinde normal evrişim uygulayın
Çıkarım çalıştırma