Temel DQN algoritması
Python ile Deep Reinforcement Learning

Timothée Carayol
Principal Machine Learning Engineer, Komment
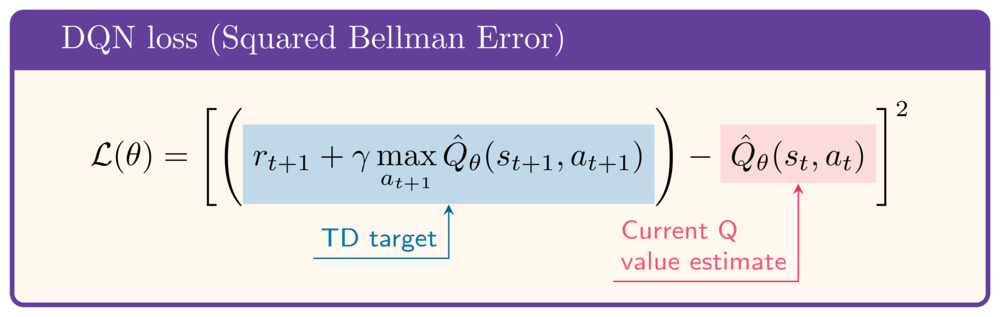
Temel DQN kayıp fonksiyonu
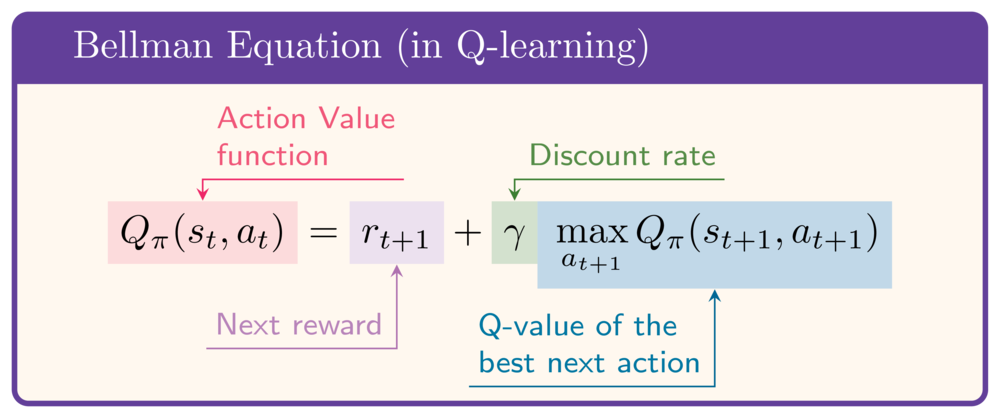
- Eylem-değer fonksiyonu Bellman Denklemini sağlar
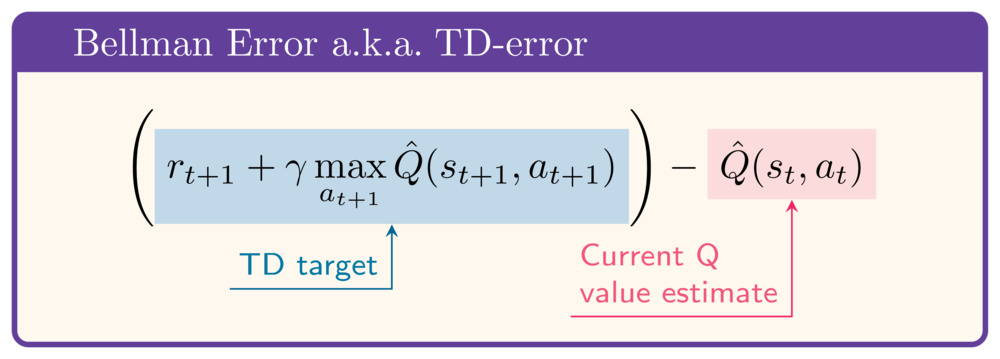
- Fikir: iki taraf arasındaki farkı en aza indir, yani TD-hatası veya Bellman hatası
- Kayıp olarak Kare Bellman Hatasını kullan: