Derin pekiştirmeli öğrenmeye giriş
Python ile Deep Reinforcement Learning

Timothée Carayol
Principal Machine Learning Engineer, Komment
Neden Derin Pekiştirmeli Öğrenme
DRL’nin bileşenleri

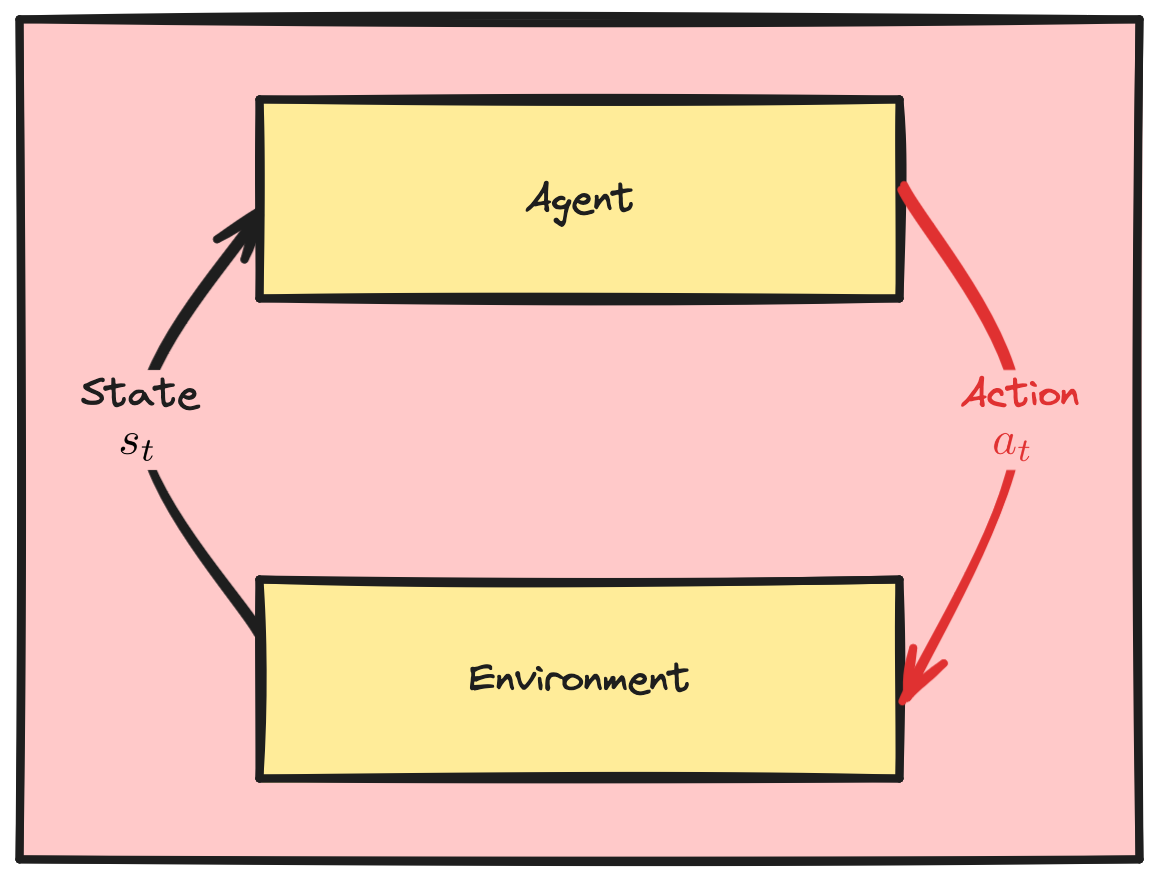
RL çerçevesi
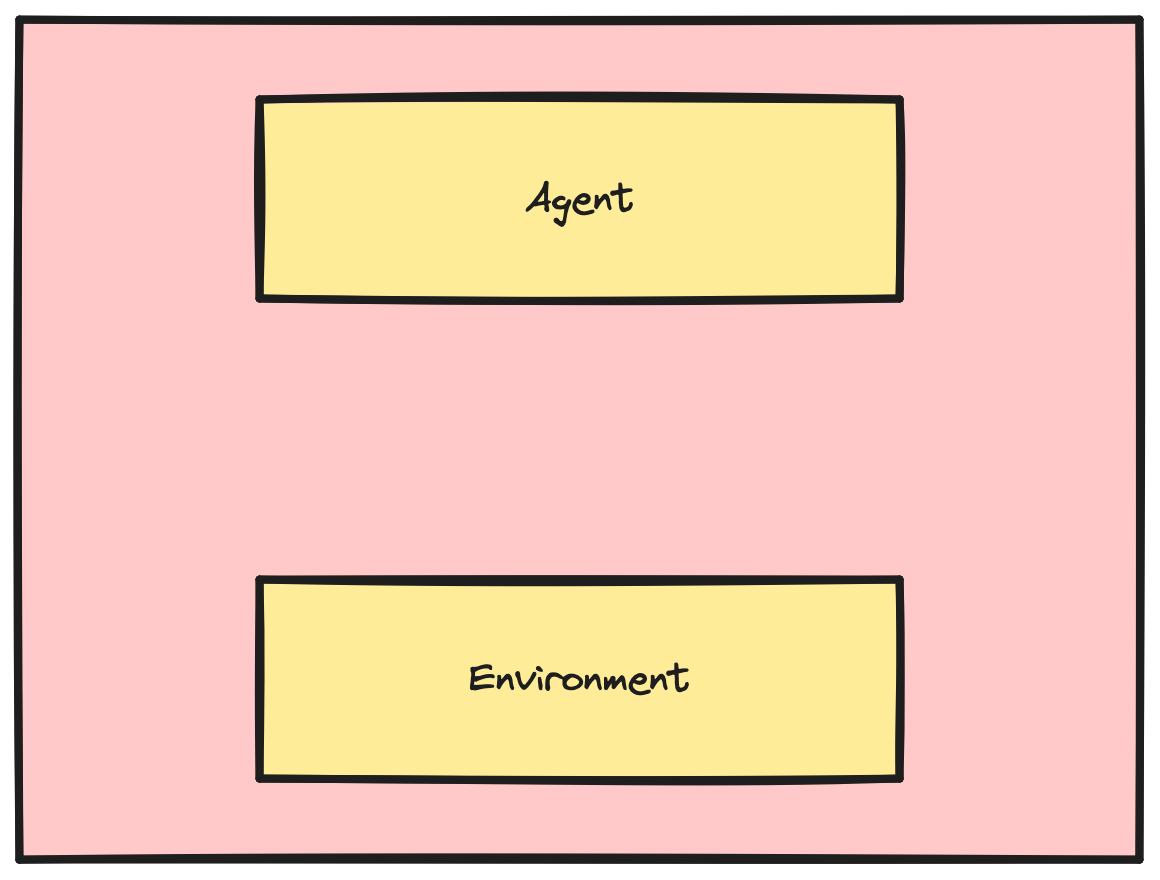
RL çerçevesi
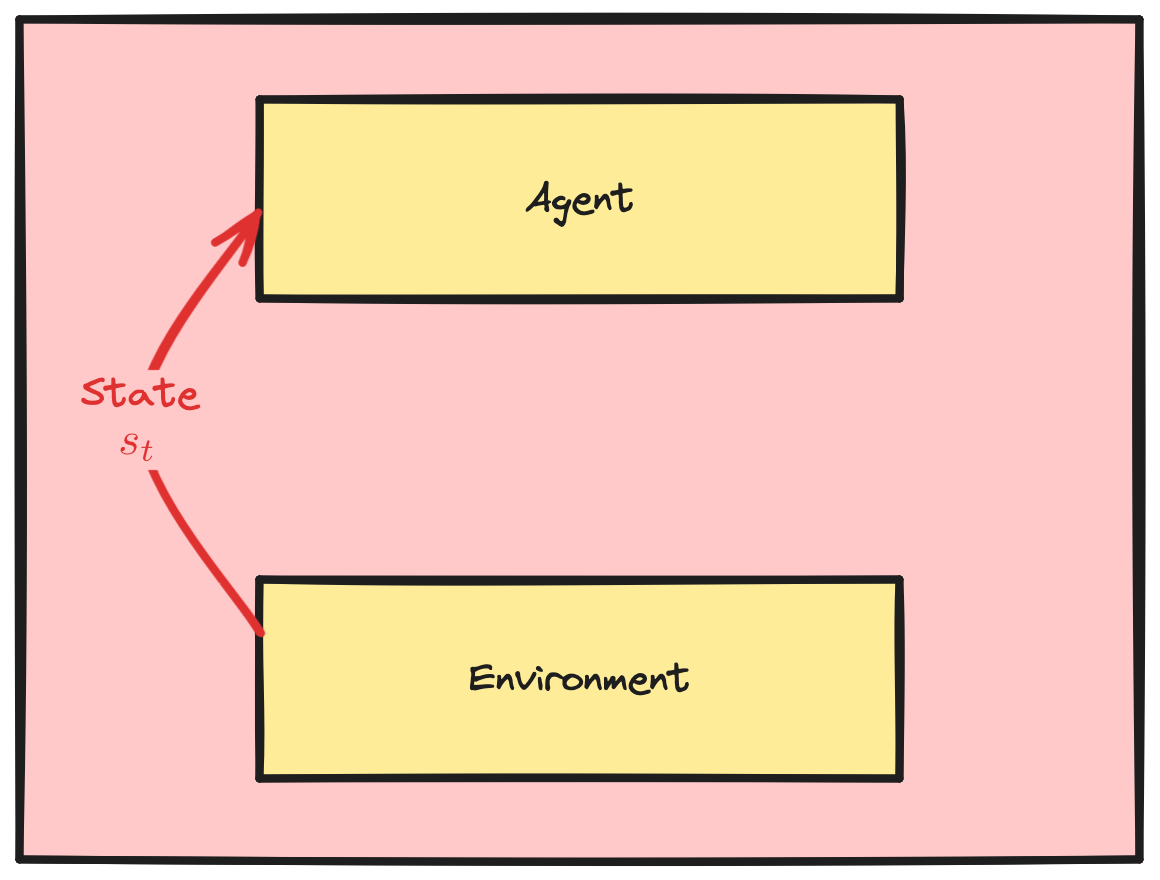
RL çerçevesi
RL çerçevesi
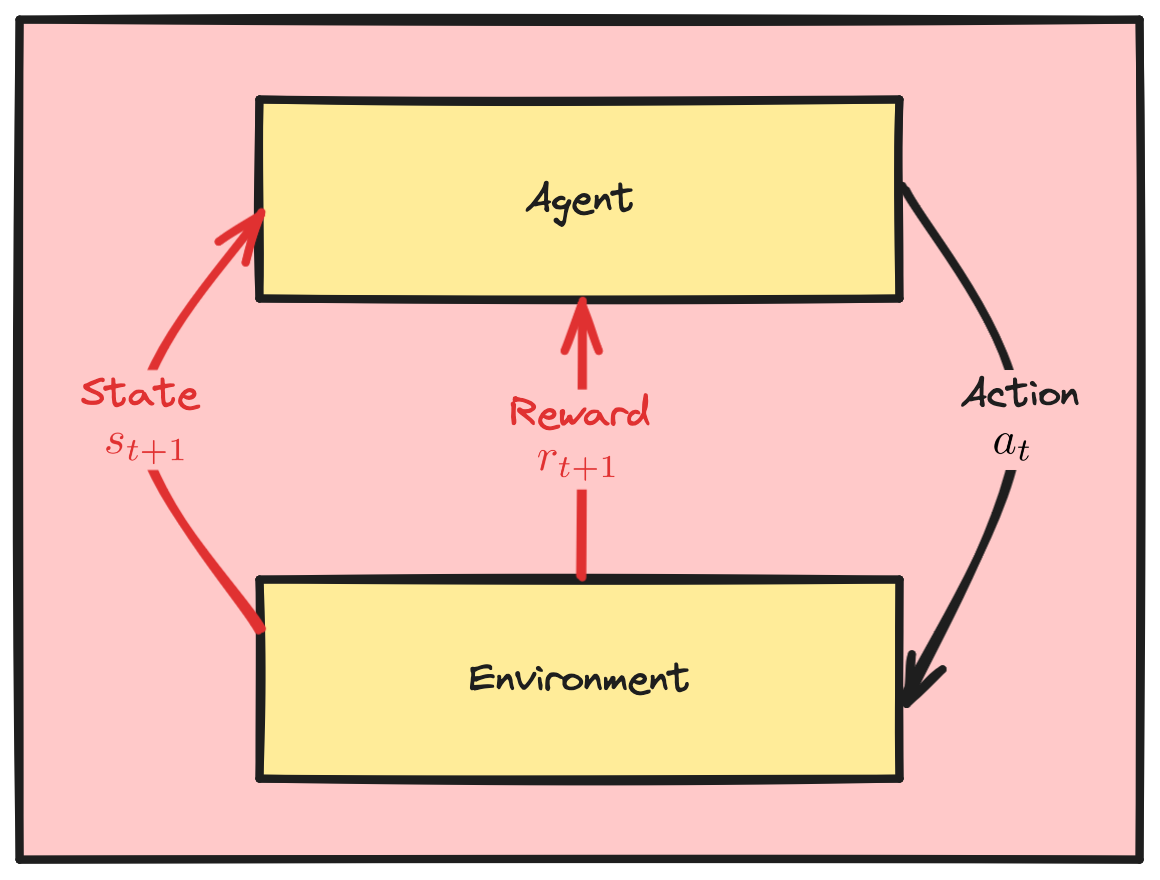
RL çerçevesi
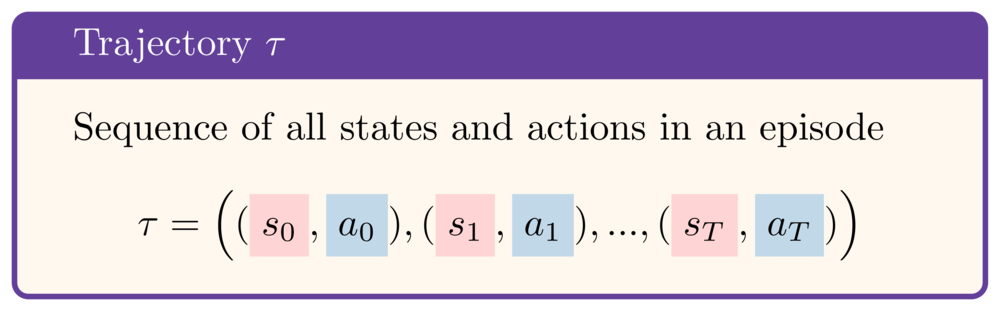
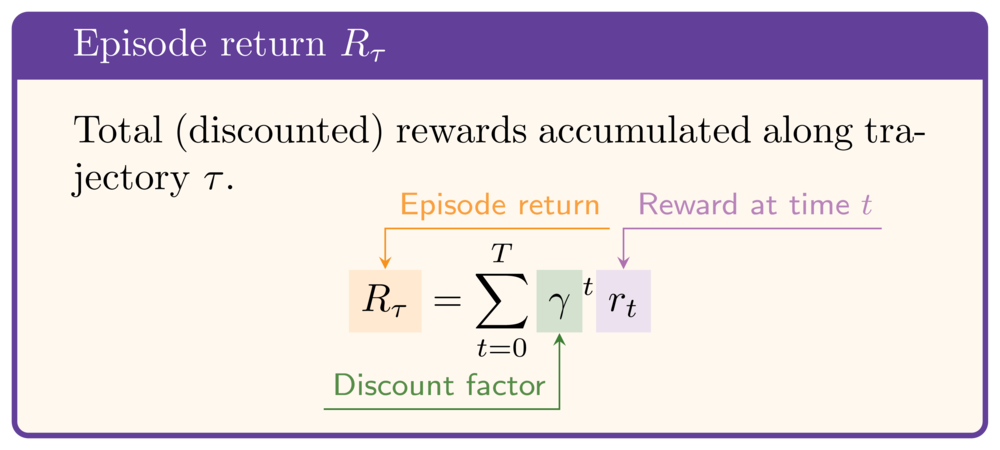
Yörünge ve bölüm getirisi
Sırada ne var


