ARCH ve GARCH nedir
Python ile GARCH Modelleri

Chelsea Yang
Data Science Instructor
Önce ARCH geldi
Otoregresif Koşullu Değişen Varyans (ARCH)
Robert F. Engle tarafından geliştirildi (2003 Nobel Ödülü sahibi)
Sonra GARCH geldi
"Genelleştirilmiş" ARCH
Tim Bollerslev tarafından geliştirildi (Robert F. Engle’ın öğrencisi)

İlgili istatistiksel terimler
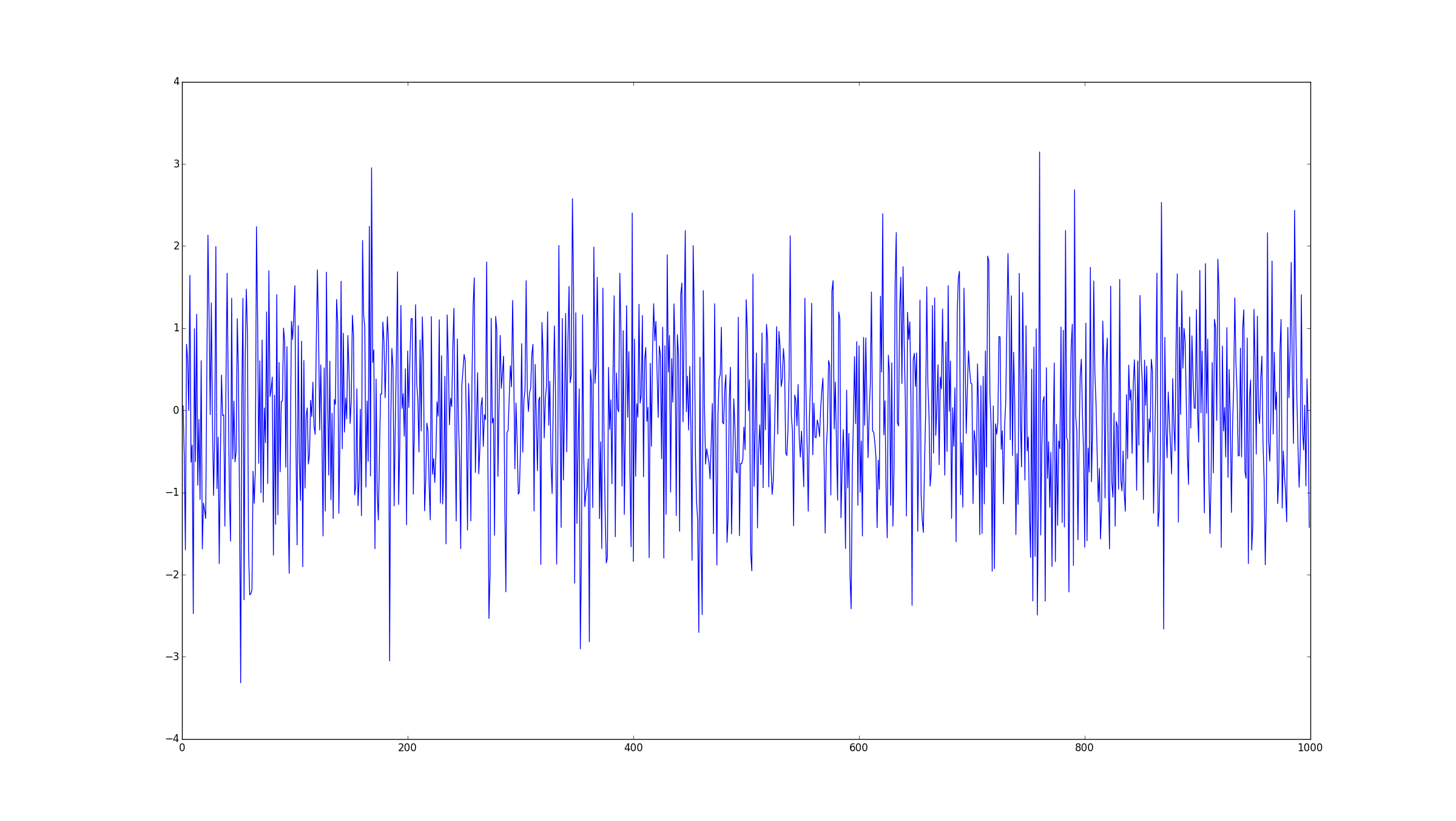
Beyaz gürültü (z): Sıfır ortalamalı ve sonlu varyanslı, bağımsız rastgele değişkenler
Artık = tahmin - gözlem
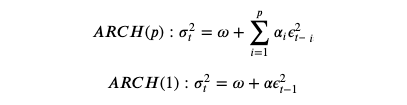
Model denklemleri: ARCH
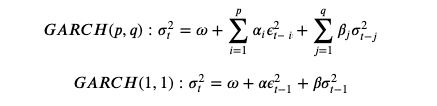
Model denklemleri: GARCH
Model sezgisi
Otoregresif: geleceği geçmişe göre tahmin eder
Oynaklık, geçmiş bilginin ağırlıklı ortalamasıdır


