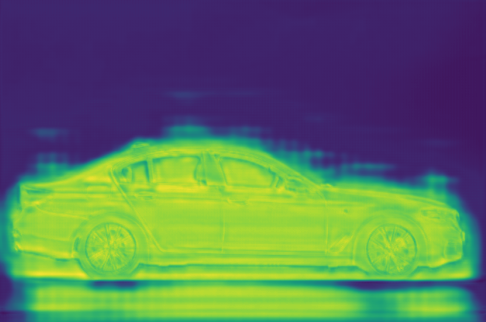
Semantische segmentatie met U-Net
Deep Learning voor afbeeldingen met PyTorch

Michal Oleszak
Machine Learning Engineer
U-Net-architectuur

Encoder:
- Convolutie- en pooling-lagen
- Downsampling: verkleint ruimtelijke afmetingen en vergroot diepte
U-Net-architectuur
Decoder:
- Symmetrisch aan de encoder
- Upsampelt featuremaps met getransponeerde convoluties
U-Net-architectuur
Skip-verbindingen:
- Koppelingen van encoder naar decoder
- Behouden details die verloren gaan bij downsampling
Getransponeerde convolutie
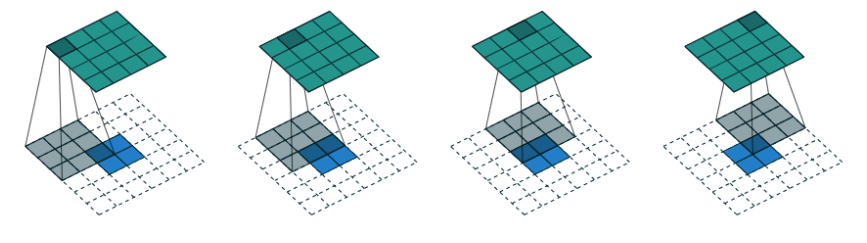
- Upsampelt featuremaps in de decoder: vergroot hoogte en breedte en vermindert diepte
- Proces van getransponeerde convolutie:
- Voeg nullen in tussen of rond de input-featuremap
- Voer een gewone convolutie uit op de met nullen opgevulde input
Inferentie uitvoeren