Het basis DQN-algoritme
Deep Reinforcement Learning in Python

Timothée Carayol
Principal Machine Learning Engineer, Komment
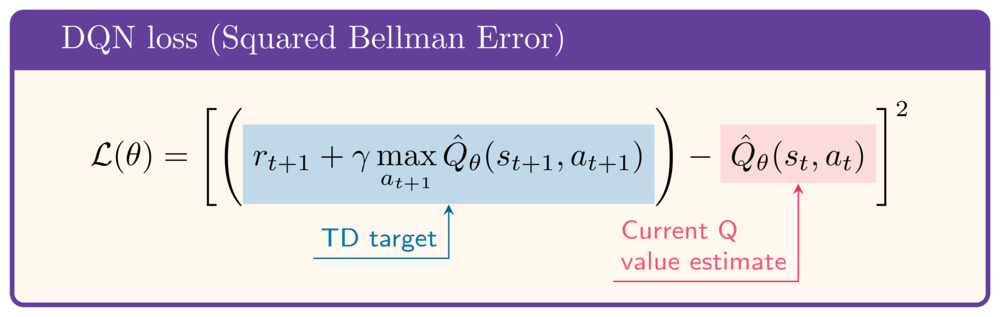
De basis DQN-verliesfunctie
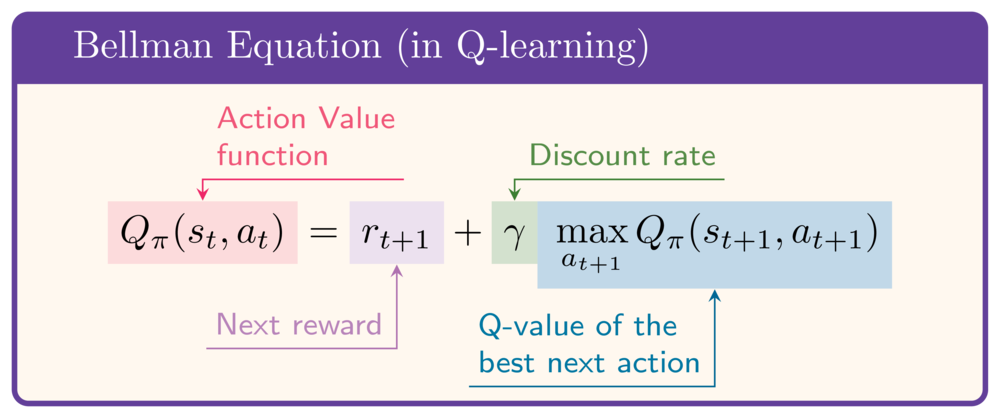
- Actiewaardefunctie voldoet aan de Bellman-vergelijking
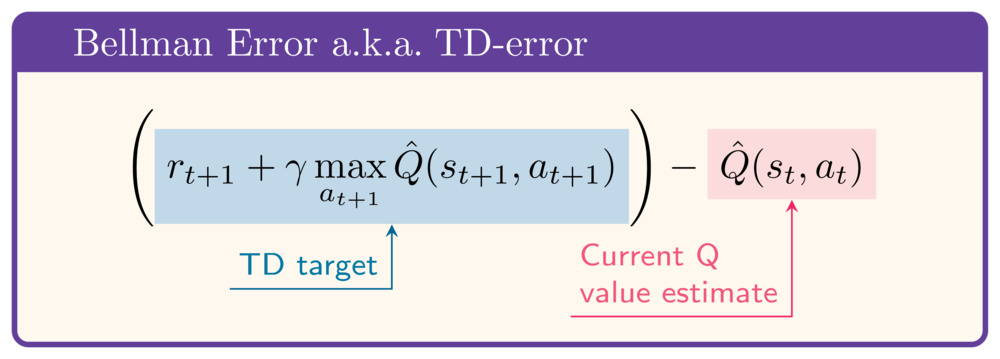
- Idee: minimaliseer het verschil tussen beide kanten (TD-/Bellman-fout)
- Gebruik het kwadraat van de Bellman-fout als verliesfunctie: