Entropiebonus en PPO
Deep Reinforcement Learning in Python

Timothée Carayol
Principal Machine Learning Engineer, Komment
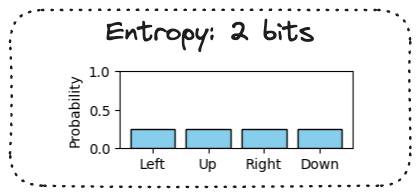
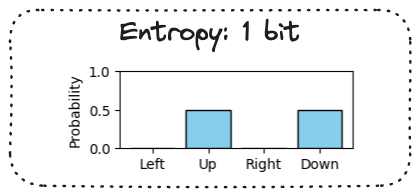
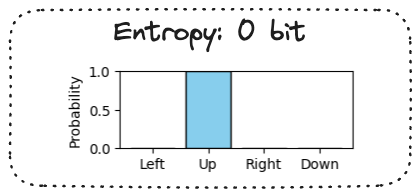
Entropiebonus
Entropie van een kansverdeling
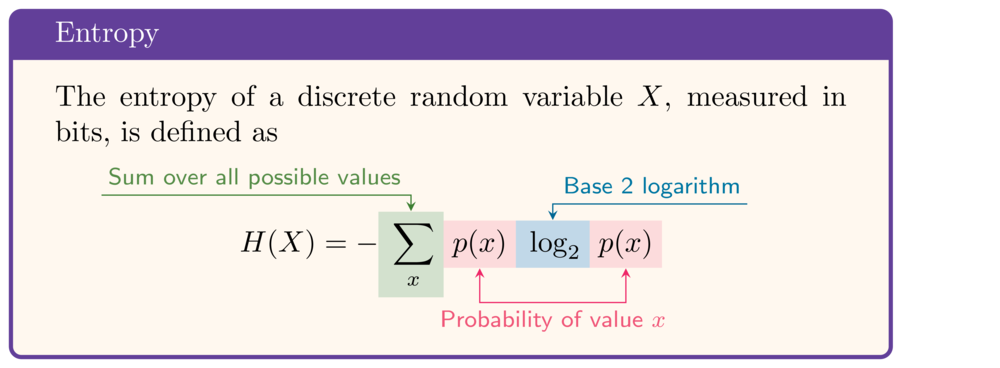
- Als $\ln$ i.p.v. $\log_2$: resultaat gemeten in nats.
- $1\ nat = \frac{1}{\ln 2}\ bit \approx 1{,}44\ bit$