Embedding dan positional encoding
Model Transformer dengan PyTorch

James Chapman
Curriculum Manager, DataCamp
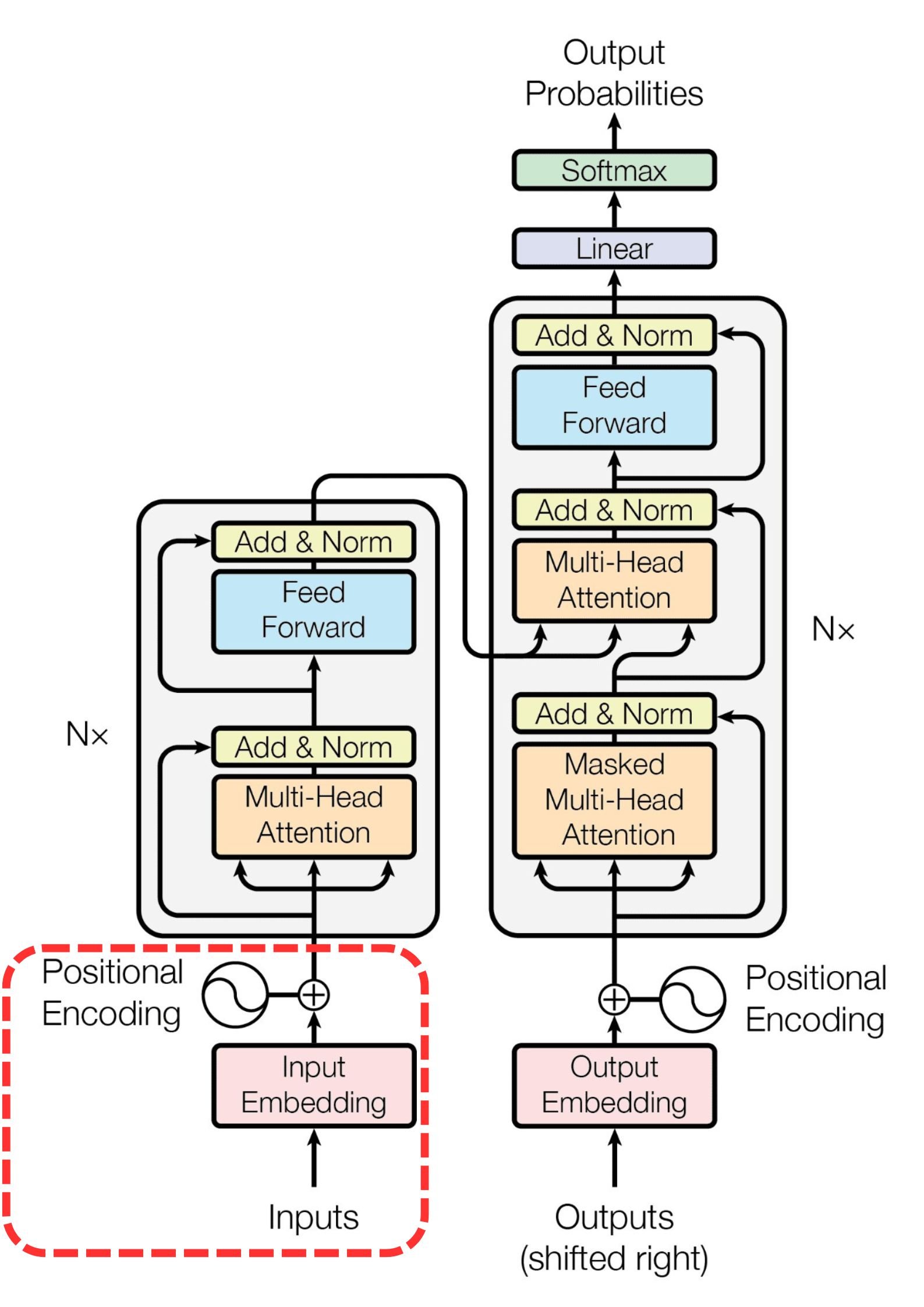
Embedding dan positional encoding pada transformer
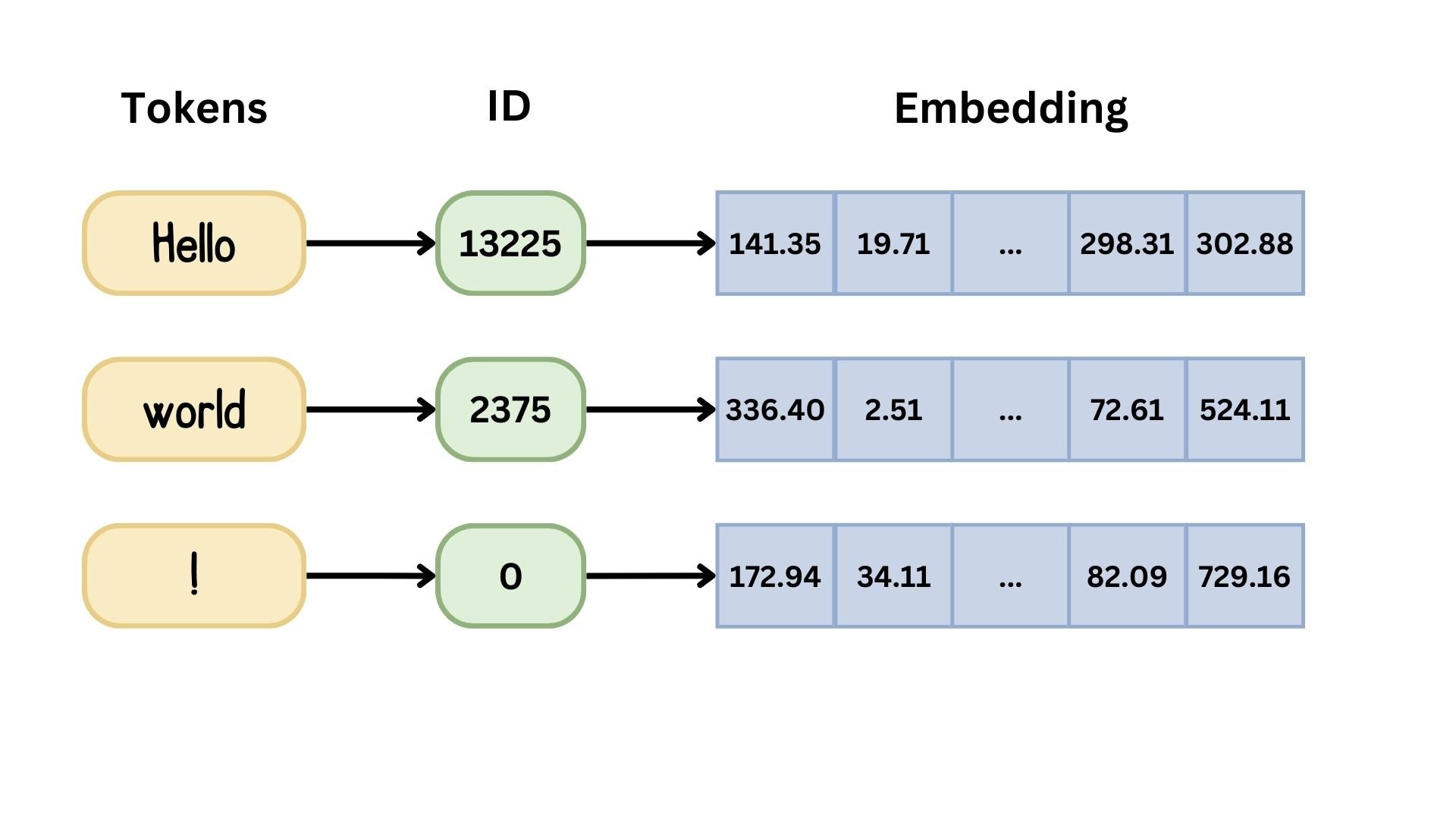
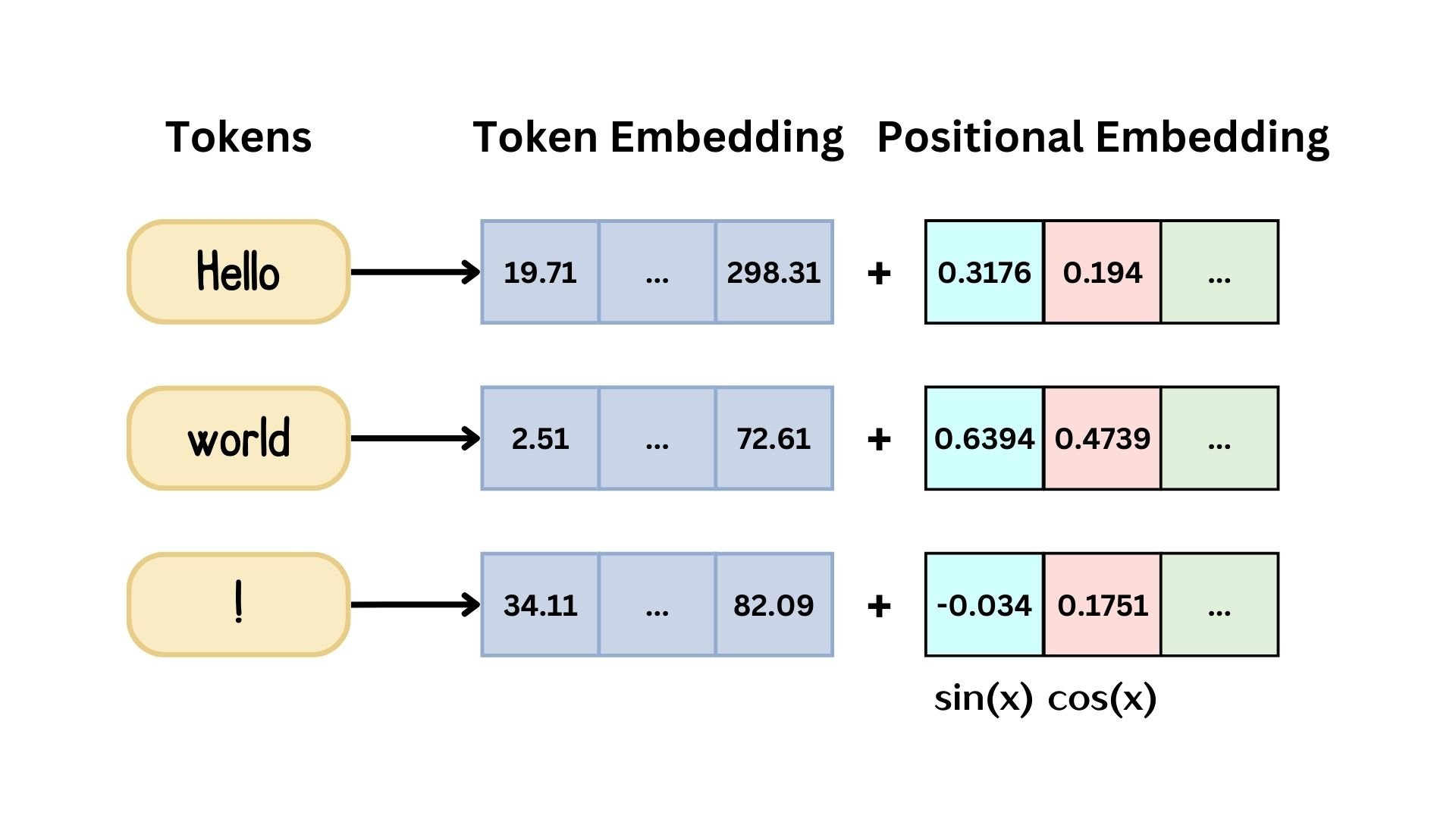
Meng-embedding sekuens

Meng-embedding sekuens
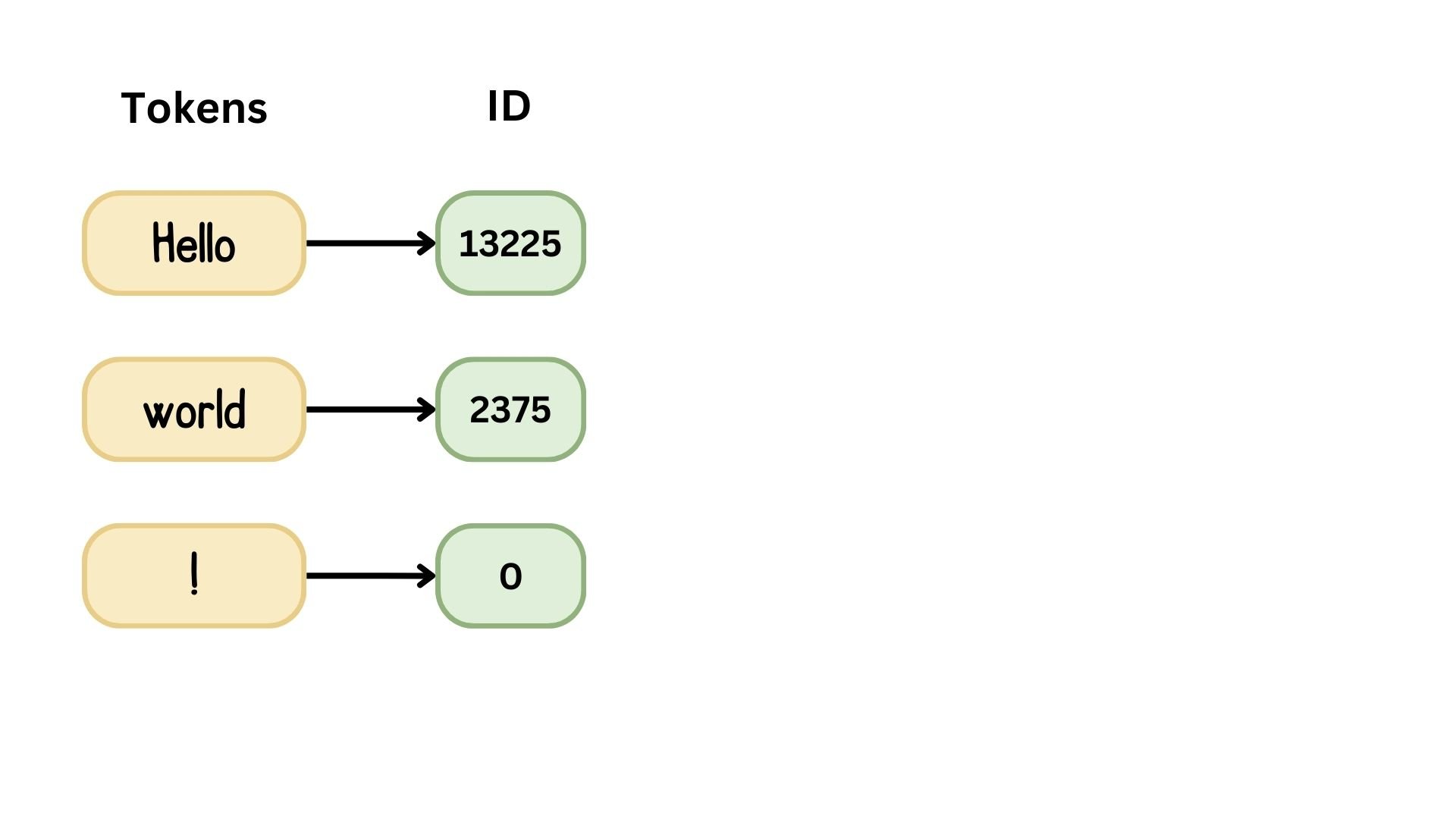
Meng-embedding sekuens
Positional encoding
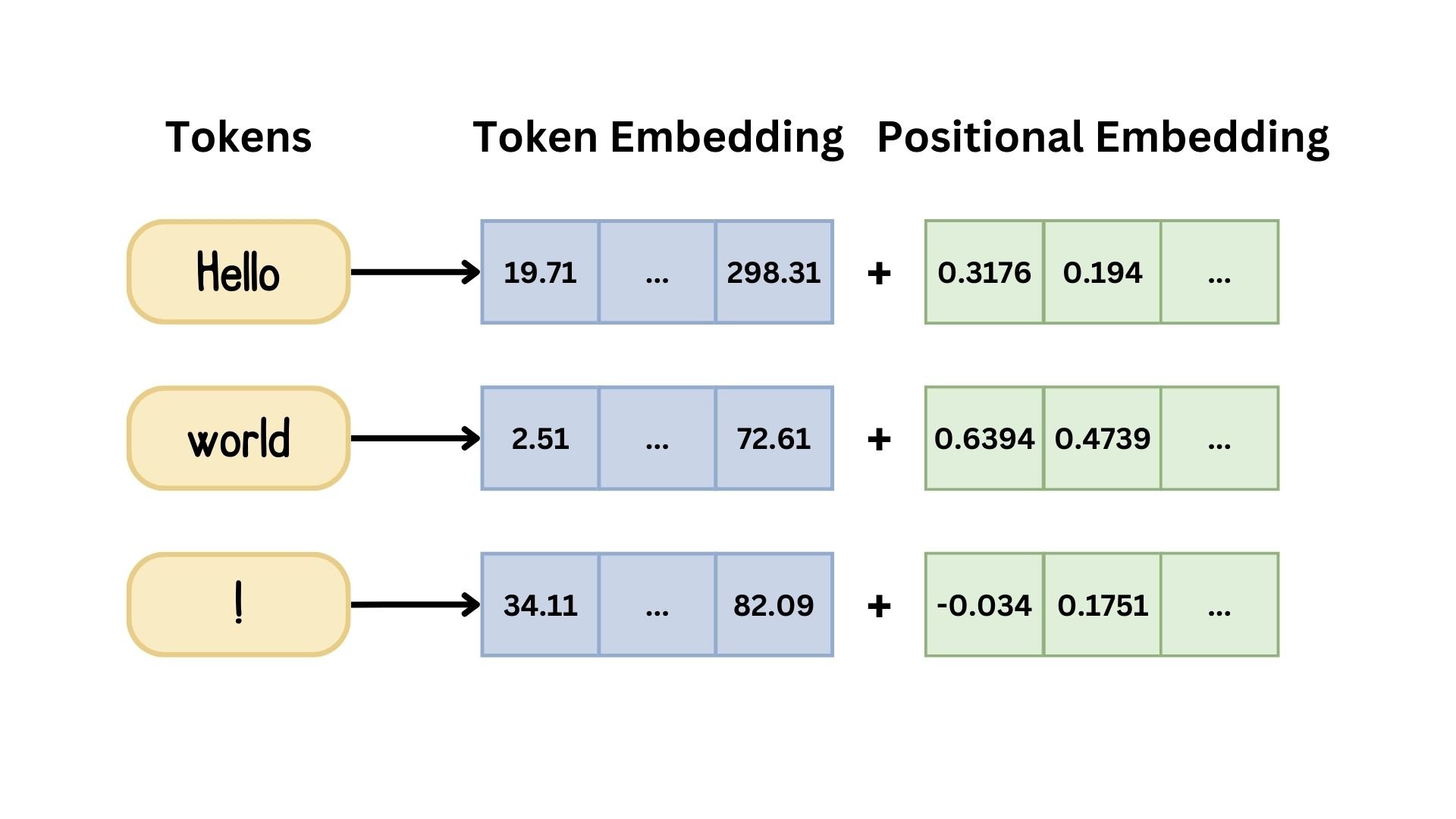
Positional encoding
sin(x)
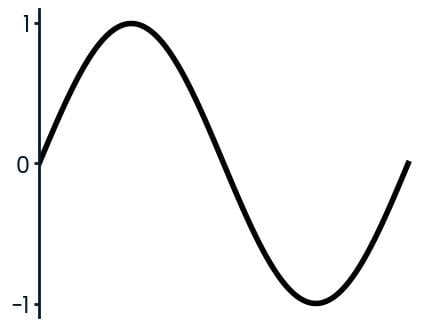
$$ PE_{(pos, 2i)}=\sin(\frac{pos}{10000^{2i/d_{model}}}) $$
cos(x)
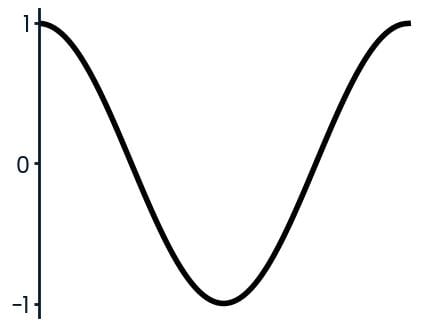
$$ PE_{(pos, 2i+1)}=\cos(\frac{pos}{10000^{2i/d_{model}}}) $$

