Algoritme DQN dasar
Deep Reinforcement Learning dengan Python

Timothée Carayol
Principal Machine Learning Engineer, Komment
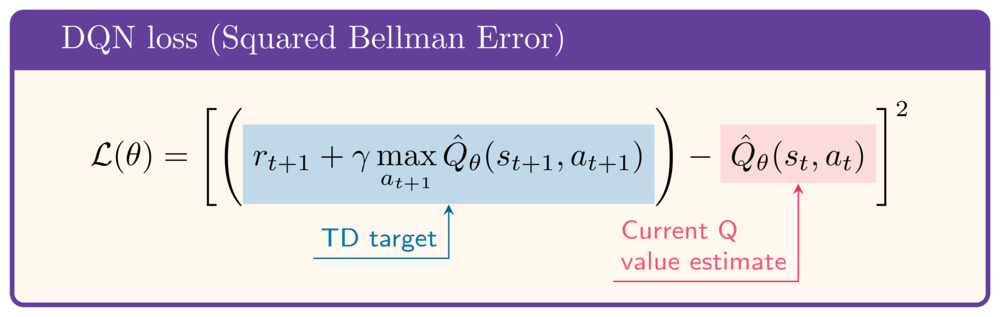
Fungsi loss DQN dasar
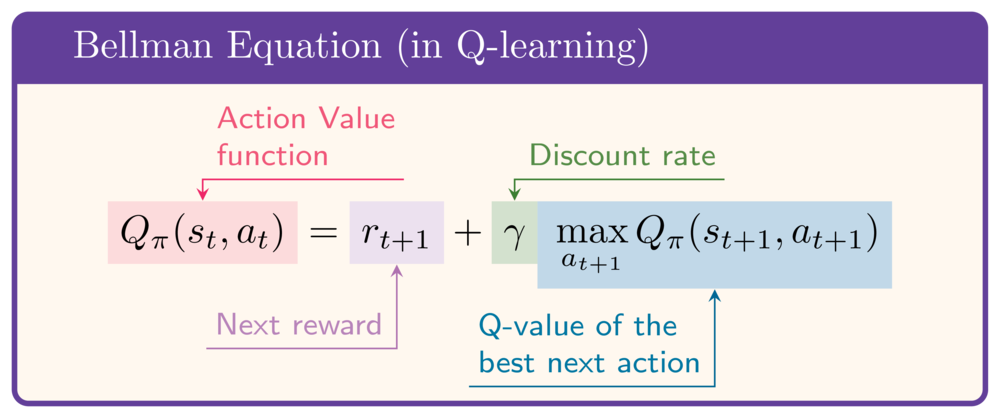
- Fungsi nilai-aksi memenuhi Persamaan Bellman
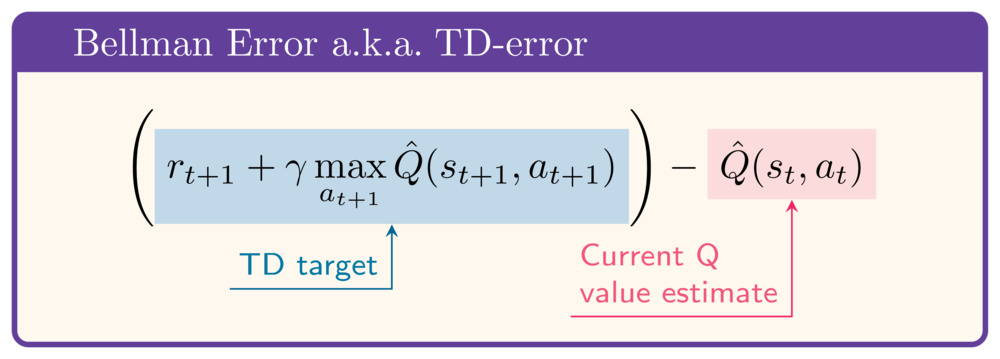
- Ide: minimalkan selisih kedua sisi (TD-error/Bellman error)
- Gunakan Kuadrat Bellman Error sebagai loss: