Funzioni obiettivo e ottimizzazione del sistema
Simulazione a eventi discreti in Python

Diogo Costa (PhD, MSc)
Adjunct Professor, University of Saskatchewan, Canada & CEO of ImpactBLUE-Scientific
Approccio 1: Cerca e Ferma
env.process(manufacturing_proc(env))
env.run()
plot_results()
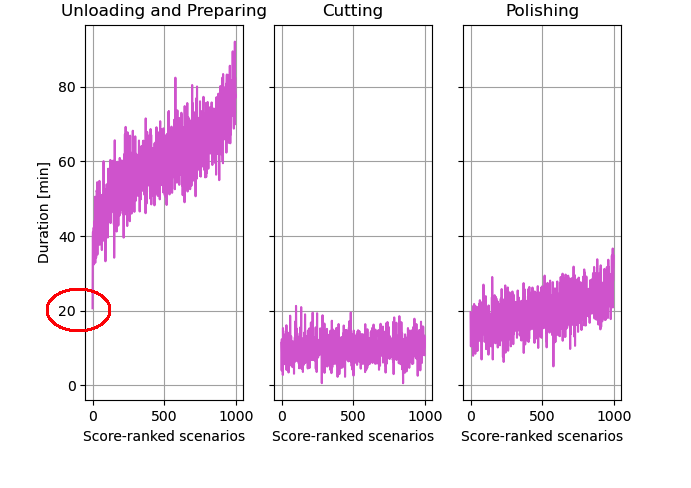
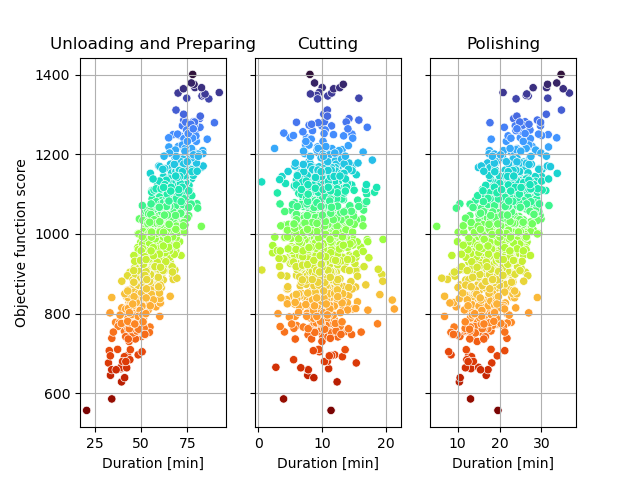
Approccio 2: Punteggia e Classifica
Punteggio
"ROSSO": Punteggio basso; "BLU": Punteggio alto
Classifica
Classifica degli scenari per punteggio
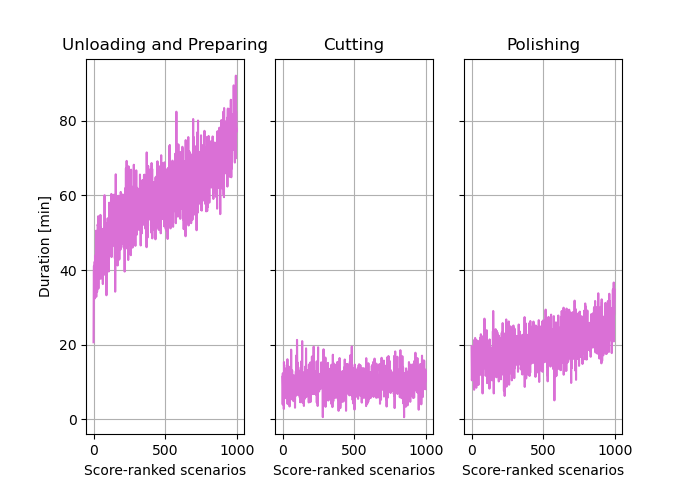
Identificare i processi critici che limitano le prestazioni
Cerca e ferma
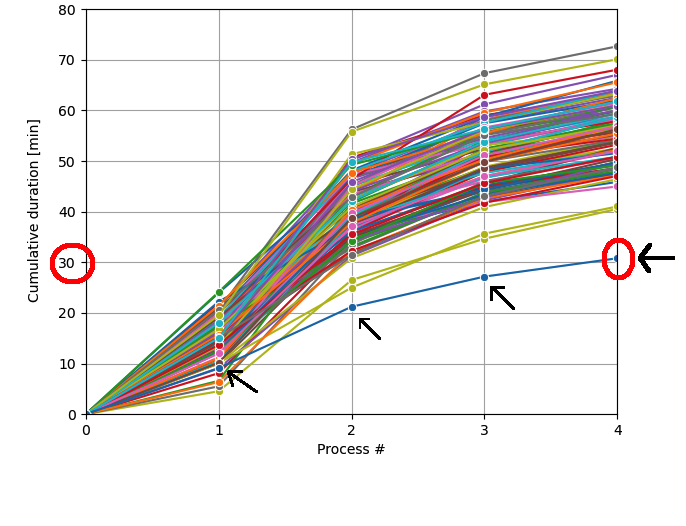
Identificare i processi critici che limitano le prestazioni
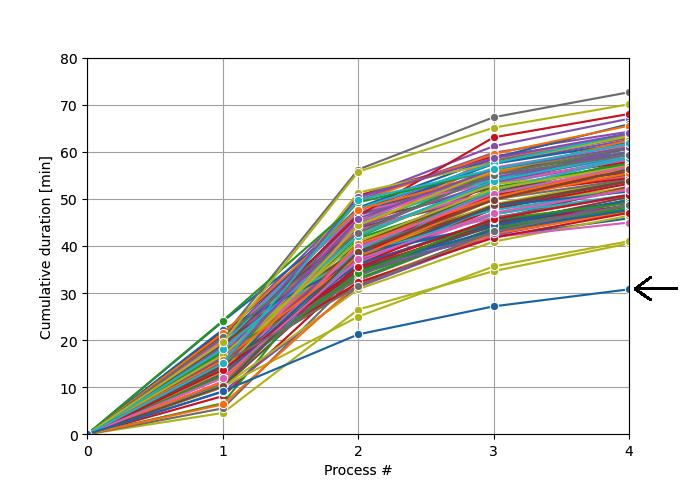
Punteggio
Obiettivo: punteggio minimo = durata minima
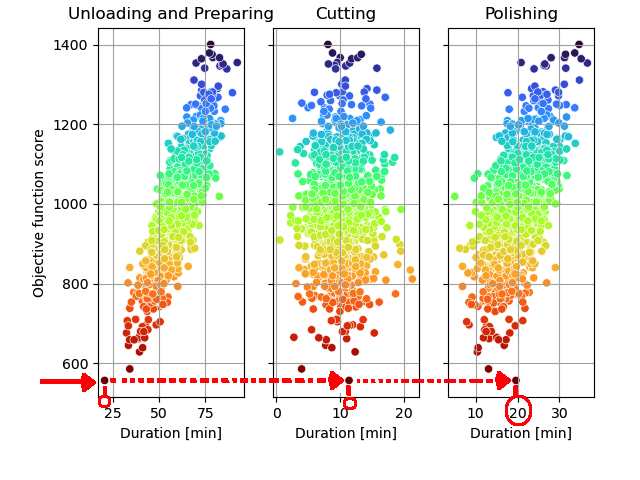
Classifica
"Processo 1" è critico per raggiungere l’obiettivo